
Mecanismos
Concepto
Mecanismos
ID:(15173, 0)
Coeficiente de sustentación
Descripción
El coeficiente de sustentación ($C_L$) es una función del angulo de ataque del ala ($\alpha$) y generalmente sigue la tendencia indicada en la siguiente figura:

En el caso representado, la pendiente es del orden de 1.5 por cada 15 grados, es decir, 0.1 1/grado o 5.73 1/radian.
ID:(7148, 0)
Variación del coeficiente de sustentación
Descripción
Tanto los aviones como las aves pueden modificar la forma de sus alas para adaptarse a diferentes condiciones de vuelo. Los aviones utilizan los flaps, mientras que las aves utilizan sus plumas primarias y secundarias. De esta manera, ambos logran un alto coeficiente de sustentación a baja velocidad (en el despegue y el aterrizaje), mientras que a alta velocidad logran un coeficiente de sustentación reducido.
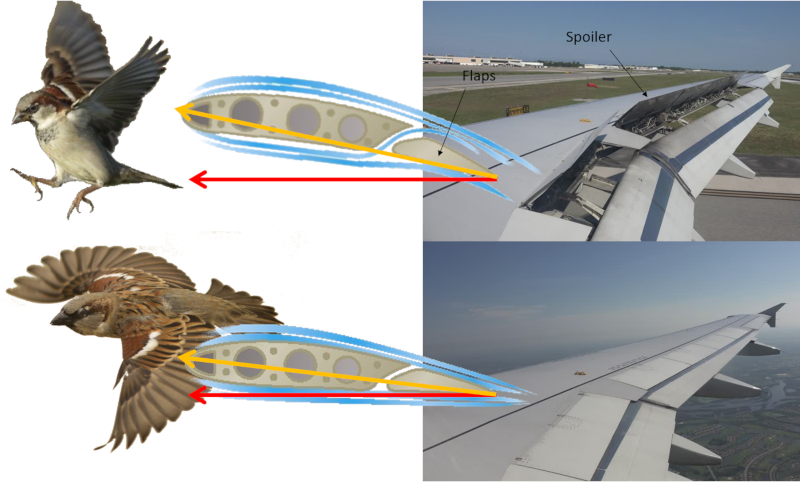
Además, los aviones también cuentan con spoilers que les ayudan a frenar durante el aterrizaje.
ID:(11072, 0)
Modelo
Concepto
Variables
Parámetros
Parámetro seleccionado
Cálculos
Ecuación
$\displaystyle\frac{dv}{dt}=a_p\left[1- \left(\displaystyle\frac{v}{v_p}\right)^2\right]$
@DIFF( v , t , 1) = a_p *[1 - v ^2/ v_p ^2 ]
$ \alpha =\displaystyle\frac{2 m g }{ c \rho S_w }\displaystyle\frac{1}{ v ^2}$
alpha =2* m * g /( c * rho * S_w * v ^2)
$ a_p = \displaystyle\frac{ F_p }{ m }$
a_p = F_p / m
$ C_L = c \alpha $
C_L = c * alpha
$ C_L =\displaystyle\frac{2 m g }{ \rho S_w }\displaystyle\frac{1}{ v ^2}$
C_L =2* m * g /( rho * S_w * v ^2)
$ F_g = m g $
F_g = m * g
$ F_L =\displaystyle\frac{1}{2} \rho S_w C_L v ^2$
F_L = rho * S_w * C_L * v ^2/2
$ m \displaystyle\frac{dv}{dt} = F_p - \displaystyle\frac{1}{2} \rho S_p C_W v ^2$
m * DIFF( v , t , 1 ) = F_p - rho * S_p * C_L * v ^2/2
$ s = \sqrt{\displaystyle\frac{ 2^3 a_p v_p t ^3}{3^2}}$
s = sqrt( 2^3 * a_p * v_p * t ^3 /3^2)
$ v = \sqrt{ 2 a_p v_p t }$
v = sqrt(2* a_p * v_p * t )
$ V2 = \sqrt{\displaystyle\frac{2 m g }{ c \rho S_w \alpha_s }}$
V2 = sqrt(2* m * g /( c * rho * S_w * alpha_s ))
$ Vr = \sqrt{\displaystyle\frac{2 m g }{ c \rho S_w \alpha }}$
Vr = sqrt( 2* m * g /( c * rho * S_w * alpha ))
$ v_p = \sqrt{\displaystyle\frac{2 F_p }{ \rho S_p C_W } }$
v_p = sqrt( 2* F_p /( rho * S_p * C_W ))
ID:(15186, 0)
Condición de vuelo
Ecuación
Para que una nave o un ave puedan mantenerse en vuelo, la fuerza gravitacional ($F_g$) tiene que contrarrestar la fuerza de gravedad, que está definida por la masa del cuerpo ($m$) y la aceleración gravitacional ($g$). En otras palabras tiene que ser:
Esta es una situación simplificada en que no se considera que la fuerza de resistencia tambien puede generar una fuerza de sustentación.
ID:(14515, 0)
Fuerza de sustentación
Ecuación
Para crear una presión mayor debajo que encima del ala y generar sustentación, se emplea la Ley de Bernoulli, corrigiendo la falta de conservación de la densidad de energía mediante un coeficiente de sustentación ($C_L$). La presión sobre el ala, la fuerza de sustentación ($F_L$), se puede estimar utilizando la densidad ($\rho$), la superficie que genera sustentación ($S_w$), el coeficiente de sustentación ($C_L$) y la velocidad respecto del medio ($v$) mediante la siguiente fórmula:
La fuerza de sustentación ($F_L$), junto con la envergadura de las alas ($L$), la densidad ($\rho$), el factor de velocidad superior del ala ($c_t$), el factor de velocidad inferior del ala ($c_b$), la largo superior del ala ($l_t$), la largo inferior del ala ($l_b$) y la velocidad respecto del medio ($v$), se encuentra en
| $ F_L = \rho L ( c_b l_b - c_t l_t ) v ^2$ |
Si consideramos la superficie que genera sustentación ($S_w$), definido por la envergadura de las alas ($L$), la largo superior del ala ($l_t$) y la largo inferior del ala ($l_b$),
| $ S_w = \displaystyle\frac{1}{2} L ( l_t + l_b )$ |
y para el coeficiente de sustentación ($C_L$), definido como
| $ C_L = 4\displaystyle\frac{ c_t l_t - c_b l_b }{ l_t + l_b }$ |
obtenemos
| $ F_L =\displaystyle\frac{1}{2} \rho S_w C_L v ^2$ |
ID:(4417, 0)
Coeficiente de sustentación en equilibrio
Ecuación
La condición para lograr el vuelo se cumple cuando la fuerza de sustentación ($F_L$) es igual al peso de la aeronave o ave, calculado a partir de la masa del cuerpo ($m$) y la aceleración gravitacional ($g$). Esto se consigue con suficientes valores adecuados de velocidad respecto del medio ($v$), la superficie que genera sustentación ($S_w$) y el coeficiente de sustentación ($C_L$), donde este último coeficiente es el factor que se puede ajustar. En el caso de las aeronaves, el piloto puede modificar el valor de el coeficiente de sustentación ($C_L$) utilizando los llamados flaps, cuyo valor debe cumplir con:
La fuerza de sustentación ($F_L$) junto con la densidad ($\rho$), la superficie que genera sustentación ($S_w$), el coeficiente de sustentación ($C_L$) y la velocidad respecto del medio ($v$) se representa como
| $ F_L =\displaystyle\frac{1}{2} \rho S_w C_L v ^2$ |
lo cual, junto con la masa del cuerpo ($m$) y la aceleración gravitacional ($g$), debe ser igual a:
| $ F_g = m g $ |
es decir:
$\displaystyle\frac{1}{2}\rho S_wC_Lv^2=mg$
lo que resulta en:
| $ C_L =\displaystyle\frac{2 m g }{ \rho S_w }\displaystyle\frac{1}{ v ^2}$ |
Los flaps se ajustan al variar el ángulo que el ala forma con la dirección de vuelo, conocido como ángulo de ataque.
ID:(4442, 0)
Constante de sustentación
Ecuación
A partir de mediciones, se concluye que el coeficiente de sustentación ($C_L$) es proporcional al angulo de ataque del ala ($\alpha$) siendo la constante de proporcionalidad del coeficiente de sustentación ($c$):
Después de cierto ángulo, la curva disminuye hasta llegar a cero. Esto se debe a que sobre dicho ángulo crítico, los vórtices cubren completamente la superficie superior del ala, lo que resulta en la pérdida de sustentación. Este fenómeno se conoce como "stall" (entrada en pérdida).
ID:(4441, 0)
Ángulo de ataque
Ecuación
Como el coeficiente de sustentación ($C_L$) es proprocional al el angulo de ataque del ala ($\alpha$), donde el factor de proprocionalidad es la constante de proporcionalidad del coeficiente de sustentación ($c$) se puede calcular el angulo necesario para volar con la masa del cuerpo ($m$), la aceleración gravitacional ($g$), la superficie que genera sustentación ($S_w$), la densidad ($\rho$) y la velocidad respecto del medio ($v$) mediante:
El coeficiente de sustentación ($C_L$) se calcula con la masa del cuerpo ($m$), la aceleración gravitacional ($g$), la superficie que genera sustentación ($S_w$), la densidad ($\rho$) y la velocidad respecto del medio ($v$) de la siguiente manera:
| $ C_L =\displaystyle\frac{2 m g }{ \rho S_w }\displaystyle\frac{1}{ v ^2}$ |
Así, con la constante de proporcionalidad del coeficiente de sustentación ($c$) y el angulo de ataque del ala ($\alpha$)
| $ C_L = c \alpha $ |
se obtiene
| $ \alpha =\displaystyle\frac{2 m g }{ c \rho S_w }\displaystyle\frac{1}{ v ^2}$ |
Es importante considerar que la lienalidad esta limitada a un angulo menor que unos 35° a 40° sobre el cual colapsa en forma catastrofica la sustentación. Por ello el angulo de ataque nunca se elige mayor a 30° o en la gerga de la aviación flap 30.
ID:(4443, 0)
Velocidad $V2$
Ecuación
El despegue ocurre cuando la velocidad respecto del medio ($v$) alcanza el umbral necesario para que el angulo de ataque del ala ($\alpha$), bajo la influencia de los flaps y la rotación del avión, cumpla con la siguiente condición:
| $ \alpha =\displaystyle\frac{2 m g }{ c \rho S_w }\displaystyle\frac{1}{ v ^2}$ |
considerando la masa del cuerpo ($m$), la densidad ($\rho$), la aceleración gravitacional ($g$), el perfil total del objeto ($S_p$) y la constante de proporcionalidad del coeficiente de sustentación ($c$).
En esta situación, el angulo de ataque del ala ($\alpha$) es igual a el ángulo necesario para la sustentación ($\alpha_s$) y la velocidad respecto del medio ($v$) a la velocidad critica $V2$ ($V2$):
ID:(14477, 0)
Velocidad de rotación $Vr$
Ecuación
La velocidad de rotación $Vr$ ($Vr$) se alcanza cuando el avión puede despegar si rota el ángulo de ascenso necesario. En otras palabras, corresponde al caso de la velocidad critica $V2$ ($V2$) con la masa del cuerpo ($m$), la aceleración gravitacional ($g$), la constante de proporcionalidad del coeficiente de sustentación ($c$), la aceleración gravitacional ($g$), el perfil total del objeto ($S_p$) y el ángulo necesario para la sustentación ($\alpha_s$):
| $ V2 = \sqrt{\displaystyle\frac{2 m g }{ c \rho S_w \alpha_s }}$ |
cuando aún no se ha girado y el ángulo necesario para la sustentación ($\alpha_s$) es igual a el angulo de ataque del ala ($\alpha$), que no incluye la rotación de la aeronave. En resumen:
ID:(14474, 0)
Aceleración al despegar
Ecuación
En esencia, las aeronaves utilizan sistemas de propulsión para alcanzar la aceleración necesaria. Esta la fuerza de propulsión ($F_p$) se contrarresta con la fuerza de resistencia ($F_W$), que junto con la densidad ($\rho$), el perfil total del objeto ($S_p$), el coeficiente de resistencia ($C_W$) y la velocidad respecto del medio ($v$), sigue la ecuación
| $ F_W =\displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
.
Por lo tanto, la fuerza total es igual al producto de la masa del cuerpo ($m$) por la aceleración ($a$), que se puede expresar como la variación de la velocidad respecto del medio ($v$) en función de tiempo ($t$), según lo indica la etiqueta
La fuerza total es igual a la fuerza de propulsión ($F_p$), a la que se opone la fuerza de resistencia ($F_W$) junto con la densidad ($\rho$), el coeficiente de resistencia ($C_W$), el perfil total del objeto ($S_p$) y la velocidad respecto del medio ($v$) según la ecuación
| $ F_W =\displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
,
lo que resulta en la siguiente ecuación:
$F = F_p - \displaystyle\frac{1}{2} \rho S_w C_L v ^2$
Dado que la fuerza total es igual a la masa del cuerpo ($m$) multiplicada por la aceleración ($a$), y esta última representa el cambio en la velocidad respecto del medio ($v$) con respecto a tiempo ($t$), obtenemos la siguiente ecuación:
$F = m a = m \displaystyle\frac{dv}{dt}$
Esto conduce a la ecuación diferencial:
| $ m \displaystyle\frac{dv}{dt} = F_p - \displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
.
.
ID:(14505, 0)
Aceleración inicial
Ecuación
Al inicio del despegue, la resistencia aerodinámica, que depende de la velocidad, es mínima. Por lo tanto, la aceleración máxima ($a_p$) está determinada únicamente por la fuerza de propulsión ($F_p$) y la masa del cuerpo ($m$):
A medida que la resistencia comience a reducir la fuerza de propulsión, esta aceleración inicial será la máxima posible.
ID:(14506, 0)
Velocidad máxima
Ecuación
La fuerza de propulsión ($F_p$) contrarresta la fuerza de resistencia ($F_W$) generando velocidad, lo que a su vez aumenta la misma fuerza de resistencia, como se describe en el perfil total del objeto ($S_p$), el coeficiente de resistencia ($C_W$), la densidad ($\rho$) y la velocidad respecto del medio ($v$) en
| $ F_W =\displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
Este proceso continúa aumentando la velocidad hasta el punto en el que la fuerza de propulsión iguala a la fuerza de resistencia, lo que representa la velocidad máxima alcanzable.
Al igualar la fuerza de propulsión con la fuerza de resistencia y resolver para la velocidad, obtenemos la velocidad máxima ($v_p$):
Si igualamos la fuerza de propulsión ($F_p$) con la fuerza de resistencia ($F_W$) con el perfil total del objeto ($S_p$), el coeficiente de resistencia ($C_W$), la densidad ($\rho$) y la velocidad respecto del medio ($v$) en
| $ F_W =\displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
obtenemos, para una la velocidad máxima ($v_p$),
$F_p = \displaystyle\frac{1}{2} \rho S_w C_L v_p ^2$
lo cual, al resolver para la velocidad máxima, resulta en
| $ v_p = \sqrt{\displaystyle\frac{2 F_p }{ \rho S_p C_W } }$ |
A medida que la resistencia comience a reducir la fuerza de propulsión, esta aceleración inicial será la máxima posible.
ID:(14507, 0)
Ecuación de velocidad al despegar
Ecuación
La ecuación de velocidad respecto del medio ($v$) para un avión que despega con la densidad ($\rho$), el perfil total del objeto ($S_p$), el coeficiente de resistencia ($C_W$), la masa del cuerpo ($m$), el tiempo ($t$) y la fuerza de propulsión ($F_p$)
| $ m \displaystyle\frac{dv}{dt} = F_p - \displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
se puede reescribir con la aceleración máxima ($a_p$) y la velocidad máxima ($v_p$) de la siguiente manera:
La ecuación de velocidad respecto del medio ($v$) para un avión que despega con la densidad ($\rho$), el perfil total del objeto ($S_p$), el coeficiente de resistencia ($C_W$), la masa del cuerpo ($m$), el tiempo ($t$) y la fuerza de propulsión ($F_p$)
| $ m \displaystyle\frac{dv}{dt} = F_p - \displaystyle\frac{1}{2} \rho S_p C_W v ^2$ |
se puede reescribir de la siguiente manera:
| $ a_p = \displaystyle\frac{ F_p }{ m }$ |
y la velocidad máxima ($v_p$)
| $ v_p = \sqrt{\displaystyle\frac{2 F_p }{ \rho S_p C_W } }$ |
de la siguiente manera:
| $\displaystyle\frac{dv}{dt}=a_p\left[1- \left(\displaystyle\frac{v}{v_p}\right)^2\right]$ |
ID:(15158, 0)
Velocidad al despegar
Ecuación
La velocidad respecto del medio ($v$) para un avión que despega satisface la ecuación con la aceleración máxima ($a_p$), la velocidad máxima ($v_p$), y el tiempo ($t$):
| $\displaystyle\frac{dv}{dt}=a_p\left[1- \left(\displaystyle\frac{v}{v_p}\right)^2\right]$ |
Cuando se integra en el límite velocidad respecto del medio ($v$) mucho menor que velocidad máxima ($v_p$), obtenemos:
La velocidad respecto del medio ($v$) para un avión que despega satisface la ecuación con la aceleración máxima ($a_p$), la velocidad máxima ($v_p$) y el tiempo ($t$):
| $\displaystyle\frac{dv}{dt}=a_p\left[1- \left(\displaystyle\frac{v}{v_p}\right)^2\right]$ |
Al integrarla, obtenemos la siguiente expresión:
$\log(v_p + v) + \log(v_p - v) = \displaystyle\frac{2 a_p}{v_p} t$
Si la velocidad respecto del medio ($v$) es mucho menor que la velocidad máxima ($v_p$), los logaritmos pueden ser expandidos en una serie de Taylor, lo que conduce a una aproximación de primer orden:
| $ v = \sqrt{ 2 a_p v_p t }$ |
Generalmente, la velocidad de despegue de una aeronave es significativamente menor que la velocidad máxima la velocidad máxima ($v_p$). Por lo tanto, la ecuación puede resolverse de manera analítica, como se explica en el desarrollo.
ID:(14508, 0)
Camino recorrido al despegar
Ecuación
Dado que la velocidad respecto del medio ($v$) al despegar, varía en función de el tiempo ($t$) conla aceleración máxima ($a_p$), la velocidad máxima ($v_p$) y el tiempo ($t$) de acuerdo con la ecuación
| $ v = \sqrt{ 2 a_p v_p t }$ |
podemos calcular la el camino recorrido en la pista ($l$) al integrar esta ecuación en el tiempo:
Como la velocidad respecto del medio ($v$) al despegar, varía en función de el tiempo ($t$) conla aceleración máxima ($a_p$), la velocidad máxima ($v_p$) y el tiempo ($t$) de acuerdo con la ecuación
| $ v = \sqrt{ 2 a_p v_p t }$ |
podemos expresar la velocidad como la tasa de cambio de el camino recorrido en la pista ($l$) con respecto a el tiempo ($t$):
$\displaystyle\frac{ds}{dt} = \sqrt{2 a_p v_p t }$
Esta ecuación se puede integrar, lo que nos proporciona la relación entre la distancia recorrida y el tiempo:
| $ s = \sqrt{\displaystyle\frac{ 2^3 a_p v_p t ^3}{3^2}}$ |
Por otro lado, al considerar la velocidad requerida para el despegue, podemos determinar el tiempo necesario para alcanzarla y, utilizando la distancia recorrida, calcular la longitud de pista necesaria para la operación de despegue.
ID:(14509, 0)