Pouso
Storyboard 
A chave para aterrissar é modificar a asa de forma a obter sustentação suficiente em velocidades mais baixas, permitindo uma descida controlada para alcançar a pista e conseguir parar a aeronave na pista disponível.
Variáveis
Cálculos
Cálculos
Equações
De maneira semelhante forma como a equa o para la força de elevação ($F_L$) foi obtida utilizando la densidade ($\rho$), o coeficiente de elevação ($C_L$), la superfície que gera sustentação ($S_w$) e la velocidade em relação ao meio ($v$)
nesta analogia, o que corresponde a la superfície que gera sustentação ($S_w$) ser equivalente a o perfil total do objeto ($S_p$) e o coeficiente de elevação ($C_L$) a o coeficiente de resistência ($C_W$), resultando no c lculo de la força de resistência ($F_W$):
O coeficiente de arrasto medido e, em fluxos turbulentos sobre corpos aerodin micos, geralmente se obt m valores em torno de 0.4.
Se igualarmos la força de propulsão ($F_p$) com la força de resistência ($F_W$) com o perfil total do objeto ($S_p$), o coeficiente de resistência ($C_W$), la densidade ($\rho$) e la velocidade em relação ao meio ($v$) em
obtemos, para uma la velocidade máxima ($v_p$),
$F_p = \displaystyle\frac{1}{2} \rho S_w C_L v_p ^2$
o que, quando resolvido para a velocidade m xima, resulta em
Com a equa o para la velocidade em relação ao meio ($v$) em o hora de decolagem ($t$) com la aceleração máxima ($a_p$) e la velocidade máxima ($v_p$):
ela pode ser integrada a partir de um valor inicial de la velocidade de pouso ($v_L$)
$\displaystyle\int_{v_L}^v \displaystyle\frac{dv}{1 - v^2/v_p^2} = -\displaystyle\int_0^t dt a_p$
e com a defini o de o tempo de propulsão de decolagem/pouso ($\tau_p$)
o resultado
Com a equa o ERROR:6110,0 usando la velocidade de pouso ($v_L$), la velocidade máxima ($v_p$), o tempo de propulsão de decolagem/pouso ($\tau_p$) e o hora de decolagem ($t$) da seguinte forma:
onde em o hora de decolagem ($t$) igual a o tempo de pouso ($t_L$), temos:
$v = v_L - v_p \tan\left(\displaystyle\frac{t_L}{\tau_p}\right)=0$
Se resolvermos esta equa o para o tempo, obtemos:
Dado que la velocidade em relação ao meio ($v$) durante o pouso varia em fun o de o hora de decolagem ($t$) com la velocidade de pouso ($v_L$), la velocidade máxima ($v_p$) e o tempo de propulsão de decolagem/pouso ($\tau_p$) de acordo com a seguinte equa o:
ela igual a o caminho percorrido na pista ($s$) como fun o de o hora de decolagem ($t$).
Podemos integrar a equa o:
$\displaystyle\frac{ds}{dt}=v_0-v_p\tan\left(\displaystyle\frac{t}{\tau_p}\right)$
Obtendo assim o caminho como:
$s = v_L t + \log(|\cos( t / \tau_p)|) v_p \tau_p$
Se o hora de decolagem ($t$), o fator logar tmico pode ser expandido at a terceira ordem, resultando no caminho de pouso sendo igual a:
Exemplos
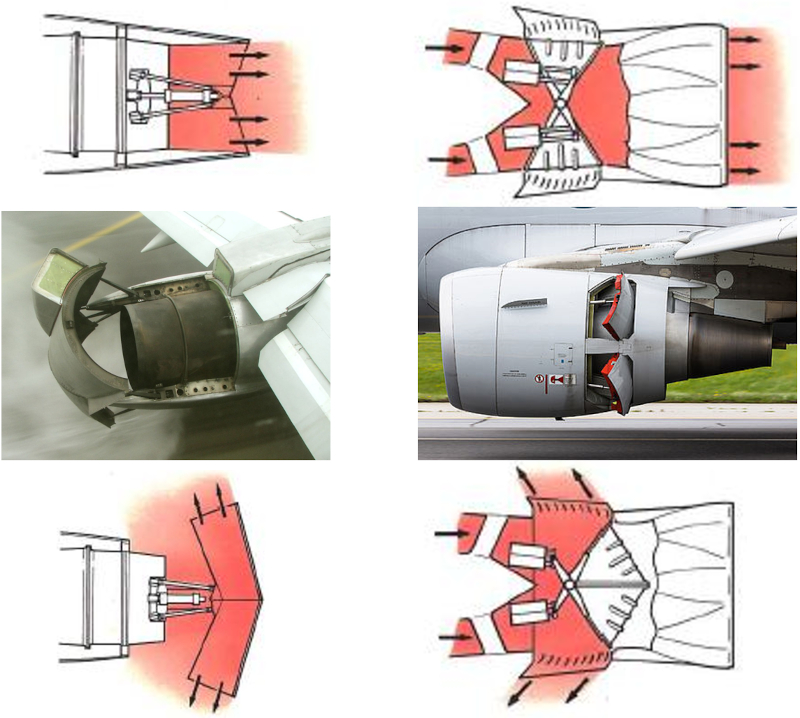
Os avi es utilizam tr s mecanismos para frear durante o pouso:
• Revers o de empuxo, que redireciona o impulso dos motores para a frente em vez de para tr s.
• Spoilers nas asas, que aumentam o coeficiente de resist ncia, expondo uma superf cie ao fluxo de ar.
• Freios convencionais nas rodas.
Na imagem abaixo, podem ser observados dois tipos de reversores de empuxo: o primeiro utiliza um defletor movido no fluxo de ar que sai do motor, enquanto o segundo direciona o pr prio fluxo de ar para a frente.
La força de resistência ($F_W$) pode ser calculado usando la densidade ($\rho$), o coeficiente de resistência ($C_W$), o perfil total do objeto ($S_p$) e la velocidade em relação ao meio ($v$) de acordo com o seguinte f rmula:
No in cio da decolagem, a resist ncia aerodin mica, que depende da velocidade, m nima. Portanto, la aceleração máxima ($a_p$) determinada unicamente por la força de propulsão ($F_p$) e la massa corporal ($m$):
medida que a resist ncia aerodin mica comece a reduzir a for a de propuls o, essa acelera o inicial ser a m xima poss vel.
La força de propulsão ($F_p$) contrabalan a la força de resistência ($F_W$) gerando velocidade, o que, por sua vez, aumenta a mesma for a de resist ncia, conforme descrito em o perfil total do objeto ($S_p$), o coeficiente de resistência ($C_W$), la densidade ($\rho$) e la velocidade em relação ao meio ($v$) em
Esse processo continua a aumentar a velocidade at o ponto em que a for a de propuls o iguala a for a de resist ncia, representando a velocidade m xima alcan vel.
Ao igualar a for a de propuls o com a for a de resist ncia e resolver para a velocidade, obtemos la velocidade máxima ($v_p$):
medida que a resist ncia aerodin mica come a a reduzir a for a de propuls o, essa acelera o inicial ser a m xima poss vel.
Com a acelera o gerada pelos motores, representada por
e a velocidade m xima associada resist ncia, descrita por
podemos definir um tempo caracter stico usando a seguinte express o:
Este tempo fornece uma estimativa da ordem de grandeza do processo de decolagem e aterrissagem, que geralmente ocorre em quest o de minutos.
A equa o para calcular la velocidade em relação ao meio ($v$) em o hora de decolagem ($t$) com la aceleração máxima ($a_p$) e la velocidade máxima ($v_p$) a seguinte:
Ap s a integra o, obt m-se o tempo de propulsão de decolagem/pouso ($\tau_p$) e la velocidade de pouso ($v_L$).
No in cio, quando o tempo muito menor que o tempo caracter stico, a tangente pode ser substitu da pelo seu argumento. Isso implica que a velocidade diminui principalmente devido influ ncia dos motores.
A equa o para ERROR:6110,0 de uma aeronave durante o pouso dada com la velocidade de pouso ($v_L$), la velocidade máxima ($v_p$), o tempo de propulsão de decolagem/pouso ($\tau_p$) e o hora de decolagem ($t$) da seguinte forma:
Portanto, o tempo de pouso ($t_L$) calculado usando esta equa o para o caso em que a velocidade naquele momento zero. Isso se traduz em:
Dado que la velocidade em relação ao meio ($v$) durante o pouso varia em rela o a o hora de decolagem ($t$) com la velocidade de pouso ($v_L$), la velocidade máxima ($v_p$) e o tempo de propulsão de decolagem/pouso ($\tau_p$) de acordo com a seguinte equa o:
podemos calcular a dist ncia percorrida ao longo da pista integrando esta equa o ao longo do tempo:
A equa o resultante uma aproxima o de terceira ordem de $t/\tau_p$, o que significa que as ajudas aerodin micas para a frenagem s o significativamente reduzidas em compara o com a revers o de impulso dos motores.
Al m disso, podemos usar o tempo de aterrizagem para estimar o comprimento da pista necess rio para a aterrissagem.
O pouso termina quando la velocidade em relação ao meio ($v$) se torna zero, o que implica que o tempo ($t$) igual a o tempo de pouso ($t_L$), resultando na redu o de o caminho percorrido na pista ($s$) para o distância de pouso ($s_L$). Portanto, com la aceleração máxima ($a_p$) e la velocidade de pouso ($v_L$), obt m-se:
ID:(1968, 0)