
Position in one dimension
Storyboard 
To define the position of an object, a coordinate system is introduced that allows establishing an origin point and defining the position by measuring the distance along a straight line or a curve. As a result, the unit of position corresponds to a length measurement, such as kilometers, meters, centimeters, and so on.
The choice of the coordinate system is flexible and is made to simplify the modeling and associated calculations as much as possible. For instance, if the object moves along a track, which may not necessarily be straight, it is advantageous to define the coordinate system along that track. In this specific case, the position is defined as the distance from the origin or the starting point of the track.
ID:(607, 0)
Length measurement reference
Definition
Each measurement corresponds to a comparison of a specific value and a reference pattern, resulting in the value being obtained in the corresponding unit.
Over time, these patterns have evolved, achieving greater accuracy. Examples include:

Fake copy of the first metre standard (notice the incorrect spelling), sealed in the foundation of a building, 36 rue de Vaugirard, Paris, Ken Eckert (Wikimedia Commons)
A copy of the provisional meter installed from 1796 to 1797, located on the wall of a building at 36 rue de Vaugirard, Paris
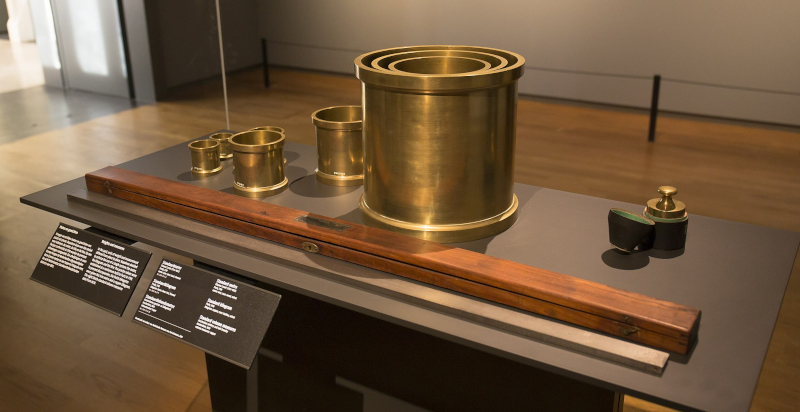
Historic Dutch replicas of metric standards in the collection of Rijksmuseum, Amsterdam: iron metre with case (constructed by Étienne Lenoir, 1799; catalog number NG-2001-16-C-8), copper grave kilogram with case (1798; catalog number NG-2001-16-D-9), copper volume measures (1829; catalog number NG-2001-16-B-28)., Yerpo (Wikimedia Commons)
In 1799, Étienne Lenoir fabricated the platinum and twelve iron standards of the meter.
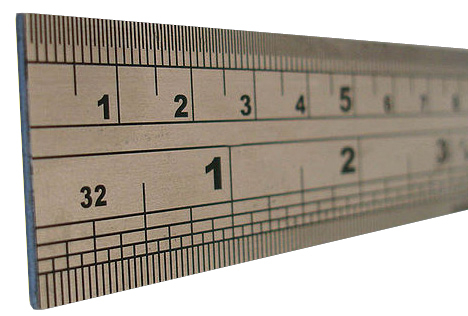
Rule (Modified from Wikimedia Commons, A ruler, depicting two customary units of length, the centimetre and the inch)
The graduated ruler includes a longitudinal graduated scale made of stainless steel to prevent rust formation from hindering reading or erasing the scale.
ID:(2238, 0)
Ruler or Tape Measure
Image
Ruler or Tape Measure are both methods of measuring length. A ruler is a flat measuring device that is marked with units of length such as inches, centimeters or millimeters. A tape measure is a flexible measuring device that is marked with units of length. Tape measures are usually more accurate than rulers, as they can measure curved surfaces and can be extended to greater lengths.

ID:(12508, 0)
Laser rangefinder
Note
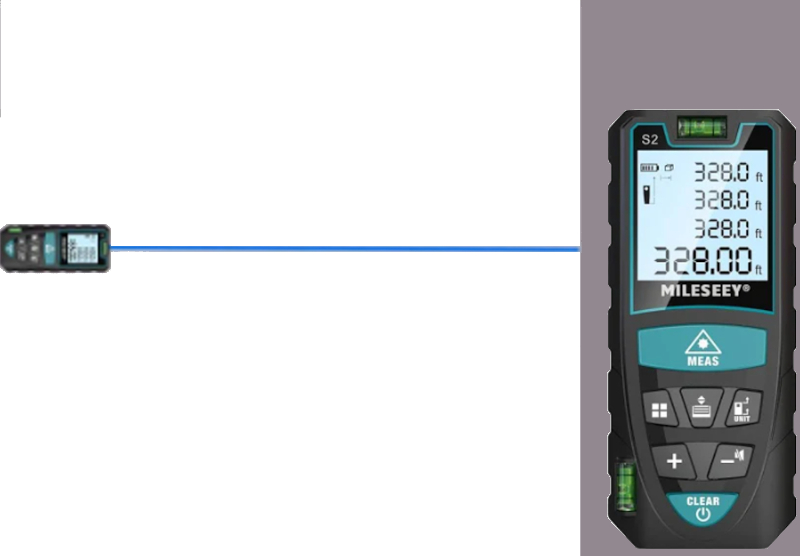
A laser rangefinder is a device that uses a laser beam to measure the distance between two points. It works by sending out a laser pulse, which is reflected off of the object being measured and then detected by the rangefinder. The time it takes for the laser pulse to travel from the rangefinder to the object and back can then be used to calculate the distance between the two points. Laser rangefinders are commonly used in surveying, navigation, and other applications where precise measurements are needed.
ID:(481, 0)
GPS (Global Positioning System)
Quote
The Global Positioning System (GPS) is a satellite-based navigation system that uses a network of 24 satellites orbiting the Earth to determine the exact location of a person or object on the planet. GPS receivers calculate the distance to each satellite by measuring the amount of time it takes for signals to travel from the satellite to the receiver. Once these distances are known, the receiver can use a process called trilateration to calculate its exact location, including longitude and latitude, as well as altitude. This can be used to measure distances between two locations, as well as the length of a path taken by a person or object.

ID:(474, 0)
Position
Exercise
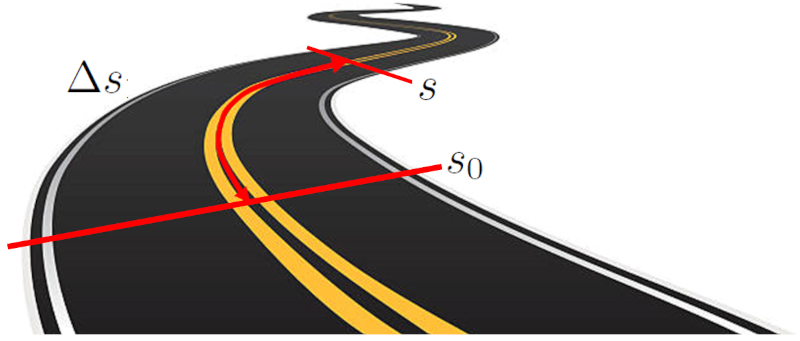
The position ($s$) of an object in a one-dimensional system refers to the location of the object in relation to a reference point. This location is expressed as the distance between the object and the origin point. This distance can be a straight line on a Cartesian axis, or it can follow a curved path:

ID:(15, 0)
Initial position
Equation
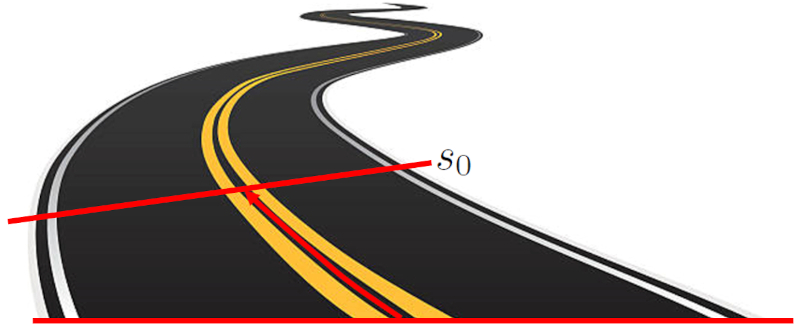
The starting position ($s_0$) is the starting location of an object before any motion begins. This location is defined as the distance between the object and the origin point. This distance can be a straight line on a Cartesian axis or it can follow a curved path.
ID:(10302, 0)
Distance traveled
Script
The distance traveled in a time ($\Delta s$) by an object is measured by measuring the distance between two specific points along a trajectory. This trajectory can be a straight line on a Cartesian axis or a curved path. The distance is calculated by measuring the length of the trajectory between the two starting and ending points.
ID:(9495, 0)
Position in one dimension
Description
To define the position of an object, a coordinate system is introduced that allows establishing an origin point and defining the position by measuring the distance along a straight line or a curve. As a result, the unit of position corresponds to a length measurement, such as kilometers, meters, centimeters, and so on. The choice of the coordinate system is flexible and is made to simplify the modeling and associated calculations as much as possible. For instance, if the object moves along a track, which may not necessarily be straight, it is advantageous to define the coordinate system along that track. In this specific case, the position is defined as the distance from the origin or the starting point of the track.
Variables
Calculations
Calculations
Equations
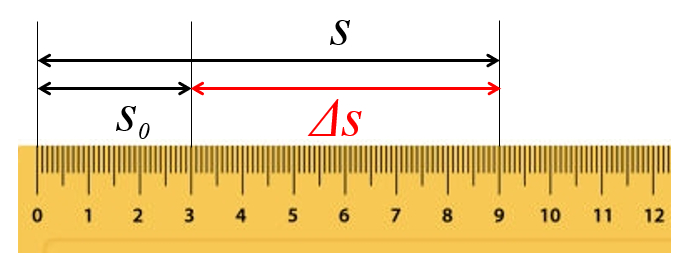
If we start from the starting position ($s_0$) and want to calculate the distance traveled in a time ($\Delta s$), we need to define a value for the position ($s$).
In a one-dimensional system, the distance traveled in a time ($\Delta s$) is simply obtained by subtracting the starting position ($s_0$) from the position ($s$), resulting in:
| $ \Delta s = s - s_0 $ |
(ID 4352)
Examples
When selecting position the position ($s$), which is smaller than the starting position ($s_0$), the result for the distance traveled in a time ($\Delta s$) is negative:
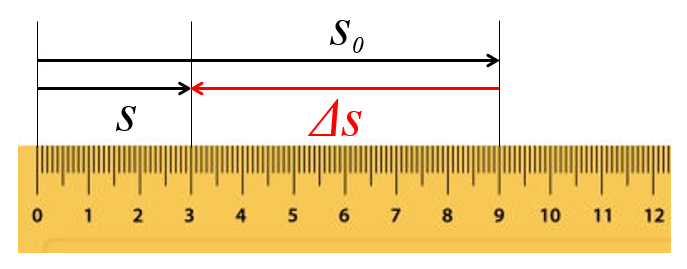
This indicates a displacement toward the negative side of the axis. In other words, the distance traveled in a time ($\Delta s$) is not just a positive distance valueit also reflects direction. A positive value means displacement in the positive axis direction, while a negative value indicates movement in the negative direction.
(ID 472)
The distance traveled in a time ($\Delta s$) tells us how to find the position ($s$), but this depends on where the measurement startsthat is, from the starting position ($s_0$).
Therefore, to determine the position ($s$), the starting position ($s_0$) must first be defined, and then the distance traveled in a time ($\Delta s$) can be used to calculate it:
(ID 15)
ID:(607, 0)