
Evolution of speed
Definition 
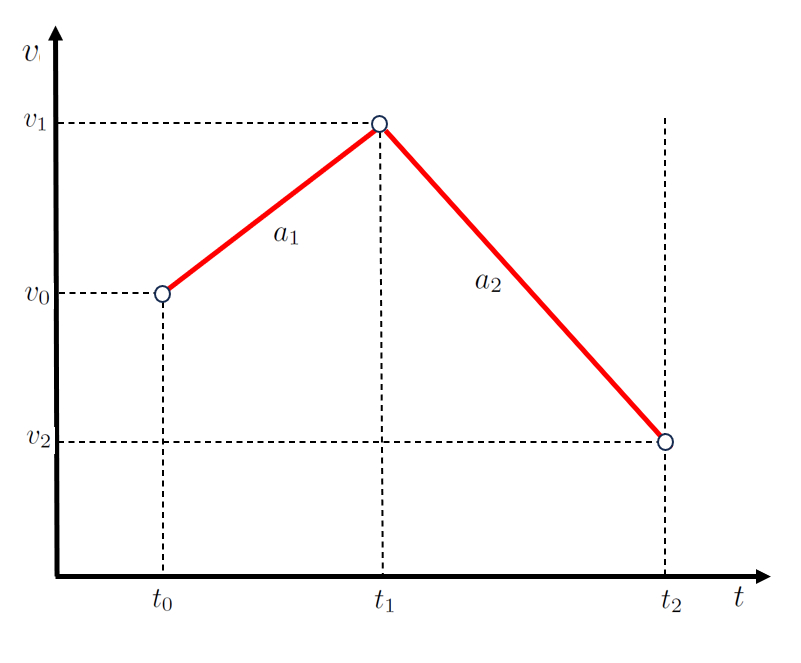
In the case of a two-stage movement, the first stage can be described by a function involving the points the start Time ($t_0$), the final time of first and start of second stage ($t_1$), the initial Speed ($v_0$), and the first stage speed ($v_1$), represented by a line with a slope of the acceleration during the first stage ($a_1$):
| $ v = v_0 + a_0 ( t - t_0 )$ |
For the second stage, defined by the points the first stage speed ($v_1$), the second stage speed ($v_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), a second line with a slope of the acceleration during the second stage ($a_2$) is employed:
| $ v = v_0 + a_0 ( t - t_0 )$ |
which is represented as:
ID:(4357, 0)
Elevarse y Correr
Description
Variables
Calculations
Calculations
Equations
If we consider the distance traveled as the difference in position between time $t+\Delta t$ and time $t$:
$\Delta s = s(t+\Delta t)-s(t)$
and take $\Delta t$ as the elapsed time, then in the limit of infinitesimally short times, the average velocity can be expressed as:
$v_m=\displaystyle\frac{\Delta s}{\Delta t}=\displaystyle\frac{s(t+\Delta t)-s(t)}{\Delta t}\rightarrow \lim_{\Delta t\rightarrow 0}\displaystyle\frac{s(t+\Delta t)-s(t)}{\Delta t}=\displaystyle\frac{ds}{dt}$
This last expression corresponds to the derivative of the position function $s(t)$:
| $ v =\displaystyle\frac{ d s }{ d t }$ |
which in turn is the slope of the graphical representation of this function over time.
(ID 3153)
With the distance traveled in a time ($\Delta s$) it is with the position ($s$) and the starting position ($s_0$):
| $ \Delta s = s_2 - s_1 $ |
and the time elapsed ($\Delta t$) is with the time ($t$) and the start Time ($t_0$):
| $ \Delta t \equiv t - t_0 $ |
The equation for average velocity:
| $ v_0 \equiv\displaystyle\frac{ \Delta s }{ \Delta t }$ |
can be written as:
$v_0 = \bar{v} = \displaystyle\frac{\Delta s}{\Delta t} = \displaystyle\frac{s - s_0}{t - t_0}$
thus, solving for it we get:
| $ s = s_0 + v_0 ( t - t_0 )$ |
(ID 3154)
As a vector can be expressed as an array of its different components,
$\vec{v}=(v_x,v_y,v_z)$
its derivative can be expressed as the derivative of each of its components:
$\displaystyle\frac{d}{dt}\vec{v}=\displaystyle\frac{d}{dt}(v_x,v_y,v_z)=\left(\displaystyle\frac{dv_x}{dt},\displaystyle\frac{dv_y}{dt},\displaystyle\frac{dv_z}{dt}\right)=\displaystyle\frac{d\vec{v}}{dt}=\vec{a}$
So, in general, instantaneous velocity in more than one dimension is:
| $ \vec{a} = \displaystyle\frac{ d\vec{v} }{ dt }$ |
(ID 3155)
In the case where the constant Acceleration ($a_0$) equals the mean Acceleration ($\bar{a}$), it will be equal to
| $ a_0 = \bar{a} $ |
.
Therefore, considering the speed Diference ($\Delta v$) as
| $ dv \equiv v - v_0 $ |
and the time elapsed ($\Delta t$) as
| $ \Delta t \equiv t - t_0 $ |
,
the equation for the constant Acceleration ($a_0$)
| $ \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t }$ |
can be written as
$a_0 = \bar{a} = \displaystyle\frac{\Delta v}{\Delta t} = \displaystyle\frac{v - v_0}{t - t_0}$
and by rearranging, we obtain
| $ v = v_0 + a_0 ( t - t_0 )$ |
.
(ID 3156)
In the case of the constant Acceleration ($a_0$), the speed ($v$) as a function of the time ($t$) forms a straight line passing through the start Time ($t_0$) and the initial Speed ($v_0$), defined by the equation:
| $ v = v_0 + a_0 ( t - t_0 )$ |
Since the distance traveled in a time ($\Delta s$) represents the area under the velocity-time curve, we can sum the contributions of the rectangle:
$v_0(t-t_0)$
and the triangle:
$\displaystyle\frac{1}{2}a_0(t-t_0)^2$
To obtain the distance traveled in a time ($\Delta s$) with the position ($s$) and the starting position ($s_0$), resulting in:
| $ \Delta s = s_2 - s_1 $ |
Therefore:
| $ s = s_0 + v_0 ( t - t_0 )+\displaystyle\frac{1}{2} a_0 ( t - t_0 )^2$ |
(ID 3157)
If we solve for the time ($t$) and the start Time ($t_0$) in the equation of the speed ($v$), which depends on the initial Speed ($v_0$) and the constant Acceleration ($a_0$):
| $ v = v_0 + a_0 ( t - t_0 )$ |
we get:
$t - t_0= \displaystyle\frac{v - v_0}{a_0}$
And when we substitute this into the equation of the position ($s$) with the starting position ($s_0$):
| $ s = s_0 + v_0 ( t - t_0 )+\displaystyle\frac{1}{2} a_0 ( t - t_0 )^2$ |
we obtain an expression for the distance traveled as a function of velocity:
| $ s = s_0 +\displaystyle\frac{ v ^2- v_0 ^2}{2 a_0 }$ |
(ID 3158)
The definition of the mean Acceleration ($\bar{a}$) is considered as the relationship between the speed Diference ($\Delta v$) and the time elapsed ($\Delta t$). That is,
| $ dv \equiv v - v_0 $ |
and
| $ \Delta t \equiv t - t_0 $ |
The relationship between both is defined as the centrifuge Acceleration ($a_c$)
| $ \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t }$ |
within this time interval.
(ID 3678)
(ID 3701)
As a vector, velocity can be expressed as an array of its different components:
$\vec{v}=\begin{pmatrix}v_x\v_y\v_z\end{pmatrix}$
And its derivative can be expressed as the derivative of each of its components:
$\displaystyle\frac{d\vec{v}}{dt}=\begin{pmatrix}\displaystyle\frac{d v_x}{dt}\displaystyle\frac{d v_y}{dt}\displaystyle\frac{d v_z}{dt}\end{pmatrix}=\begin{pmatrix}a_x\a_y\a_z\end{pmatrix}=\vec{a}$
Thus, in general, the instantaneous velocity in more than one dimension is a vector with components in each of the directions:
| $ \vec{ v } =\displaystyle\frac{d \vec{s} }{d t }$ |
(ID 4354)
(ID 4355)
If we consider the difference in the speed ($v$) at times $t+\Delta t$ and $t$:
$\Delta v = v(t+\Delta t)-v(t)$
and take $\Delta t$ as the time elapsed ($\Delta t$), then in the limit of infinitesimally short times:
$a=\displaystyle\frac{\Delta v}{\Delta t}=\displaystyle\frac{v(t+\Delta t)-v(t)}{\Delta t} \rightarrow \lim_{\Delta t\rightarrow 0}\displaystyle\frac{v(t+\Delta t)-v(t)}{\Delta t}=\displaystyle\frac{dv}{dt}$
This last expression corresponds to the derivative of the function the speed ($v$):
| $ a =\displaystyle\frac{ d v }{ d t }$ |
which, in turn, is the slope of the graphical representation of that function at the time ($t$).
(ID 4356)
En el caso de que se asuma que el tiempo inicial es nulo\\n\\n
$t_0=0$
la ecuaci n de la posici n
| $ s = s_0 + v_0 ( t - t_0 )+\displaystyle\frac{1}{2} a_0 ( t - t_0 )^2$ |
se reduce a
| $ s = s_0 + v_0 t +\displaystyle\frac{1}{2} a_0 t ^2$ |
(ID 4360)
Examples
We can calculate the distance traveled in a time ($\Delta s$) from the starting position ($s_0$) and the position ($s$) using the following equation:
| $ \Delta s = s_2 - s_1 $ |
(ID 4352)
To describe the motion of an object, we need to calculate the time elapsed ($\Delta t$). This magnitude is obtained by measuring the start Time ($t_0$) and the the time ($t$) of said motion. The duration is determined by subtracting the initial time from the final time:
| $ \Delta t \equiv t - t_0 $ |
(ID 4353)
Acceleration corresponds to the change in velocity per unit of time.
Therefore, it is necessary to define the speed Diference ($\Delta v$) in terms of the speed ($v$) and the initial Speed ($v_0$) as follows:
| $ dv \equiv v - v_0 $ |
(ID 4355)
The mean Speed ($\bar{v}$) can be calculated from the distance traveled in a time ($\Delta s$) and the time elapsed ($\Delta t$) using:
| $ \bar{v} \equiv\displaystyle\frac{ \Delta s }{ \Delta t }$ |
(ID 3152)
$v=\displaystyle\frac{L}{t}$
(ID 3699)
The instantaneous ERROR:6029,0, determined by the relationship between the infinitesimal distance traveled ($ds$) and the infinitesimal Variation of Time ($dt$), provides a more accurate estimate of the actual velocity at any moment of the time ($t$), compared to the mean Speed ($\bar{v}$), which is calculated from the distance traveled in a time ($\Delta s$) and the time elapsed ($\Delta t$) using the equation:
| $ \bar{v} \equiv\displaystyle\frac{ \Delta s }{ \Delta t }$ |
This is achieved through the derivative of position with respect to time, i.e.,:
| $ v =\displaystyle\frac{ d s }{ d t }$ |
Thus, the instantaneous velocity the speed ($v$) of the position ($s$) is known at any instant of the time ($t$) with greater precision.
(ID 3153)
In general, velocity should be understood as a three-dimensional entity, that is, a vector. Its position is described by a position vector
| $ v =\displaystyle\frac{ d s }{ d t }$ |
This allows for the generalization of velocity:
| $ \vec{ v } =\displaystyle\frac{d \vec{s} }{d t }$ |
(ID 4354)
In the case of a two-stage movement, the first stage can be described by a function involving the points the start Time ($t_0$), the final time of first and start of second stage ($t_1$), the initial Speed ($v_0$), and the first stage speed ($v_1$), represented by a line with a slope of the acceleration during the first stage ($a_1$):
| $ v = v_0 + a_0 ( t - t_0 )$ |
For the second stage, defined by the points the first stage speed ($v_1$), the second stage speed ($v_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), a second line with a slope of the acceleration during the second stage ($a_2$) is employed:
| $ v = v_0 + a_0 ( t - t_0 )$ |
which is represented as:
(ID 4357)
$v_t=v+v_r$
(ID 3701)
If the speed is constant, the velocity will be equal to the initial Speed ($v_0$). In this case, the distance traveled as a function of time can be calculated using the difference between the position ($s$) and the starting position ($s_0$), divided by the difference between the time ($t$) and the start Time ($t_0$):
| $ s = s_0 + v_0 ( t - t_0 )$ |
The corresponding equation defines a straight line in space-time.
(ID 3154)
The proportion in which the variation of velocity over time is defined as the mean Acceleration ($\bar{a}$). To measure it, it is necessary to observe the speed Diference ($\Delta v$) and the time elapsed ($\Delta t$).
One common method for measuring average acceleration involves using a stroboscopic lamp that illuminates the object at defined intervals. By taking a photograph, one can determine the distance traveled by the object in that time. By calculating two consecutive velocities, one can determine their variation and, with the time elapsed between the photos, the average acceleration.
The equation that describes average acceleration is as follows:
| $ \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t }$ |
It is important to note that average acceleration is an estimation of actual acceleration.
The main problem is that if acceleration varies during the elapsed time, the value of the average acceleration may differ greatly from the mean acceleration
.
Therefore, the key is to
Determine acceleration over a sufficiently short period of time to minimize variation.
(ID 3678)
In general, velocity should be understood as a three-dimensional vector. That is to say, its the position ($s$) needs to be described by a vector a posición (vector) ($\vec{s}$), for which each component the speed ($v$) can be defined as shown in the following equation:
| $ a =\displaystyle\frac{ d v }{ d t }$ |
This allows for the generalization of the speed (Vector) ($\vec{v}$) as follows:
| $ \vec{a} = \displaystyle\frac{ d\vec{v} }{ dt }$ |
(ID 3155)
The variable the mean Acceleration ($\bar{a}$), calculated as the change in the speed Diference ($\Delta v$) divided by the interval of the time elapsed ($\Delta t$) through
| $ \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t }$ |
is an approximation of the actual acceleration, which tends to distort when the acceleration fluctuates during the time interval. Therefore, the concept of the instant acceleration ($a$) determined over a very small time interval is introduced. In this case, we are referring to an infinitesimally small time interval, and the variation of velocity over time reduces to the derivative of the speed ($v$) with respect to the time ($t$):
| $ a =\displaystyle\frac{ d v }{ d t }$ |
which corresponds to the derivative of velocity.
(ID 4356)
If the constant Acceleration ($a_0$), then the mean Acceleration ($\bar{a}$) is equal to the value of acceleration, that is,
| $ a_0 = \bar{a} $ |
.
In this case, the speed ($v$) as a function of the time ($t$) can be calculated by considering that it is associated with the difference between the speed ($v$) and the initial Speed ($v_0$), as well as the time ($t$) and the start Time ($t_0$).
| $ v = v_0 + a_0 ( t - t_0 )$ |
This equation thus represents a straight line in velocity-time space.
(ID 3156)
In the case of ERROR:5297.1, the speed ($v$) varies linearly with the time ($t$), using the initial Speed ($v_0$) and the start Time ($t_0$):
| $ v = v_0 + a_0 ( t - t_0 )$ |
Thus, the area under this line can be calculated, yielding the distance traveled in a time ($\Delta s$). Combining this with the starting position ($s_0$), we can calculate the position ($s$), resulting in:
| $ s = s_0 + v_0 ( t - t_0 )+\displaystyle\frac{1}{2} a_0 ( t - t_0 )^2$ |
This corresponds to the general form of a parabola.
(ID 3157)
En el caso de que se asuma que la aceleraci n inicial es constante y tiempo inicial nulo la ecuaci n de la posici n
| $ s = s_0 + v_0 ( t - t_0 )+\displaystyle\frac{1}{2} a_0 ( t - t_0 )^2$ |
se reduce a
| $ s = s_0 + v_0 t +\displaystyle\frac{1}{2} a_0 t ^2$ |
(ID 4360)
In the case of constant acceleration, we can calculate the position ($s$) from the starting position ($s_0$), the initial Speed ($v_0$), the time ($t$), and the start Time ($t_0$) using the equation:
| $ s = s_0 + v_0 ( t - t_0 )+\displaystyle\frac{1}{2} a_0 ( t - t_0 )^2$ |
This allows us to determine the relationship between the distance covered during acceleration/deceleration and the change in velocity:
| $ s = s_0 +\displaystyle\frac{ v ^2- v_0 ^2}{2 a_0 }$ |
(ID 3158)
If an object is described in a coordinate system where the z-axis points \"down\" (towards the ground), the acceleration it experiences is equal to the gravitational acceleration, which is defined as positive:
$a = g > 0$
Since the acceleration is constant, the velocity will evolve linearly, as shown in the following equation:
| $$ |
Therefore, in this case, it can be reduced to the following equation:
| $ v_{pg} = v_0 + g t $ |
(ID 4359)
If an object is described in a coordinate system where the z-axis points upwards (towards the sky), the acceleration experienced by the object is equal to the gravitational acceleration defined as negative, given by
$a = -g < 0$
.
Since the acceleration is constant, the velocity of the object will change linearly, as described by the equation
| $$ |
,
which simplifies to
| $ v_{ng} = v_0 - g t $ |
in this particular case.
(ID 4358)
(ID 4736)
ID:(317, 0)