Rotational kinetic energy and moments of inertia
Storyboard 
The kinetic energy of rotation is a function of the angular velocity achieved through the application of torque over a given time while traversing a given angle.
Thus, rotational kinetic energy is proportional to the moment of inertia of the object and the square of the angular velocity.
ID:(1417, 0)
Moment of inertia
Storyboard
In rotational dynamics, the moment of inertia plays a role equivalent to that of inertial mass in translational motion. However, unlike mass, the moment of inertia depends on the geometry of the body and how its mass is distributed with respect to the axis of rotation. Therefore, its calculation is essential for each situation that is intended to be modeled.
Variables
Calculations
Calculations
Equations
The work variance ($\Delta W$) required for an object to change from the initial Angular Speed ($\omega_0$) to the angular Speed ($\omega$) is obtained by applying a the torque ($T$) that produces an angular displacement the difference of Angles ($\Delta\theta$), according to:
Applying Newton's second law for rotation, in terms of the moment of inertia for axis that does not pass through the CM ($I$) and the mean Angular Acceleration ($\bar{\alpha}$):
this expression can be rewritten as:
$\Delta W = I \alpha \Delta\theta$
or, using the difference in Angular Speeds ($\Delta\omega$) and the time elapsed ($\Delta t$):
we get:
$\Delta W = I\displaystyle\frac{\Delta\omega}{\Delta t} \Delta\theta$
Using the definition of the mean angular velocity ($\bar{\omega}$) and the time elapsed ($\Delta t$):
results in:
$\Delta W = I\displaystyle\frac{\Delta\omega}{\Delta t} \Delta\theta = I\omega \Delta\omega$
where the difference in Angular Speeds ($\Delta\omega$) is expressed as:
On the other hand, the angular velocity can be approximated by the average angular velocity:
$\bar{\omega}=\displaystyle\frac{\omega_1 + \oemga_2}{2}$
By combining both expressions, we obtain the equation:
$\Delta W = I \omega \Delta\omega = I(\omega_2 - \omega_1) \displaystyle\frac{(\omega_1 + \omega_2)}{2} = \displaystyle\frac{I}{2}(\omega_2^2 - \omega_1^2)$
Therefore, the change in energy is expressed as:
$\Delta W = \displaystyle\frac{I}{2}\omega_2^2 - \displaystyle\frac{I}{2}\omega_1^2$
This allows us to define the rotational kinetic energy as:
The moment of inertia of a rod rotating around a perpendicular ($\perp$) axis passing through the center is obtained by dividing the body into small volumes and summing them:
resulting in
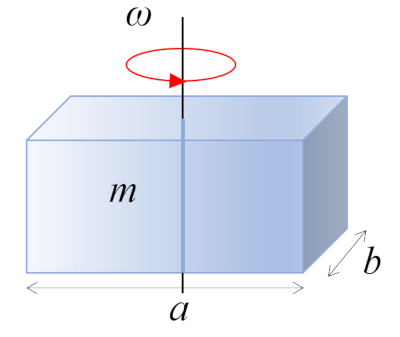
The moment of inertia of a parallelepiped rotating around an axis passing through its center is obtained by partitioning the body into small volumes and summing them up:
resulting in
The moment of inertia of a cylinder rotating around an axis parallel ($\parallel$) to its central axis is obtained by segmenting the body into small volumes and summing them:
resulting in
The moment of inertia of a cylinder rotating around a perpendicular ($\perp$) axis passing through the center is obtained by segmenting the body into small volumes and summing them:
resulting in
The moment of inertia of a sphere rotating around an axis passing through its center is obtained by segmenting the body into small volumes and summing:
resulting in
Examples
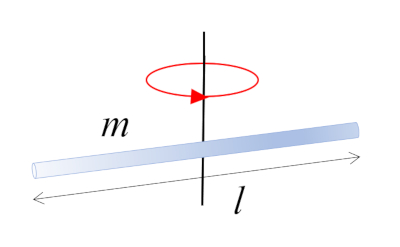
A bar with mass $m$ and length $l$ rotating around its center, which coincides with the center of mass:
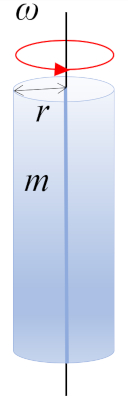
A rotation of a cylinder with mass $m$ and radius $r$ around the axis of the cylinder, where the center of mass (CM) is located at mid-height:
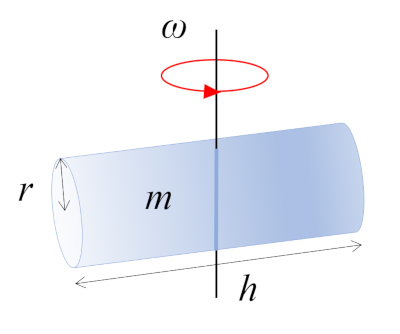
In this scenario, a cylinder with mass $m$, radius $r$, and height $h$ is rotating around an axis perpendicular to its own axis. This axis passes through the midpoint of the cylinder's length, where the center of mass (CM) is located:
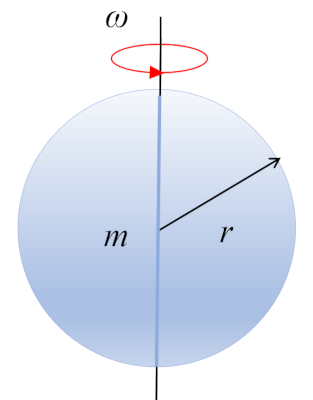
A sphere with mass $m$ and radius $r$ is rotating around its center of mass, which is located at its geometric center:
A straight rectangular parallelepiped with mass $m$ and sides $a$ and $b$, perpendicular to the axis of rotation, is rotating around its center of mass, which is located at the geometric center of the body:
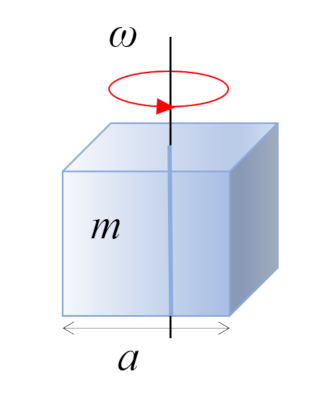
In the case of a right rectangular parallelepiped with mass $m$ and side $a$, the center of mass is located at the geometric center:
The moment of inertia for axis that does not pass through the CM ($I$) can be calculated using the moment of Inertia Mass Center ($I_{CM}$) and adding the moment of inertia of the body mass ($m$) as if it were a point mass at the distance Center of Mass and Axis ($d$):
The moment of Inertia at the CM of a thin Bar, perpendicular Axis ($I_{CM}$) is obtained as a function of the body mass ($m$) and the length of the Bar ($l$):
The moment of Inertia at the CM of a Cylinder, Axis parallel to the Cylinder Axis ($I_{CM}$) is obtained as a function of the body mass ($m$) and the radius of a Cylinder ($r_c$):
The moment of Inertia at the CM of a Cylinder, Axis perpendicular to the Cylinder Axis ($I_{CM}$) is obtained as a function of the body mass ($m$), the cylinder Height ($h$) and the radius of a Cylinder ($r_c$):
The moment of Inertia at the CM of a thin Bar, perpendicular Axis ($I_{CM}$) is obtained as a function of the body mass ($m$), the length of the Edge of the Straight Parallelepiped ($a$) and the width of the Edge of the Straight Parallelepiped ($b$):
The moment of Inertia at the CM of a Sphere ($I_{CM}$) is obtained as a function of the body mass ($m$) and the radio of the Sphere ($r_e$):
The kinetic energy of rotation ($K_r$) is a function of the angular Speed ($\omega$) and of a measure of inertia represented by the moment of inertia for axis that does not pass through the CM ($I$):
ID:(1417, 0)