
Aceleração angular constante, dois estágios
Storyboard 
No caso de um movimento angular acelerado em duas etapas, no momento em que se passa da primeira para a segunda aceleração angular, a velocidade angular final da primeira etapa se torna a velocidade angular inicial da segunda. O mesmo ocorre com o ângulo, onde o ângulo final da primeira etapa é igual ao ângulo inicial da segunda etapa.Ao contrário do modelo de duas velocidades angulares, este modelo não apresenta problemas de descontinuidade, exceto que a aceleração angular pode mudar de forma abrupta, o que é tecnicamente possível, embora muitas vezes não seja muito realista.
ID:(1409, 0)
Movimento em dois estágios
Descrição
Em um cenário de movimento em duas etapas, inicialmente o objeto ajusta sua velocidade pela diferença de la variação das velocidades angulares no primeiro estágio (\Delta\omega_1) durante um período de o tempo decorrido na primeira etapa (\Delta t_1), experimentando uma aceleração de la aceleração angular durante o primeiro estágio (\alpha_1).
| \alpha_1 \equiv \displaystyle\frac{ \Delta\omega_1 }{ \Delta t_1 } |
Na segunda etapa, o objeto continua modificando sua velocidade por la variação das velocidades angulares no segundo estágio (\Delta\omega_2) ao longo de um intervalo de tempo o tempo gasto na segunda etapa (\Delta t_2), com uma aceleração de la aceleração angular durante o segundo estágio (\alpha_2).
| \alpha_2 \equiv \displaystyle\frac{ \Delta\omega_2 }{ \Delta t_2 } |
Ao visualizar isso graficamente, obtém-se um diagrama de velocidade versus tempo como mostrado abaixo:
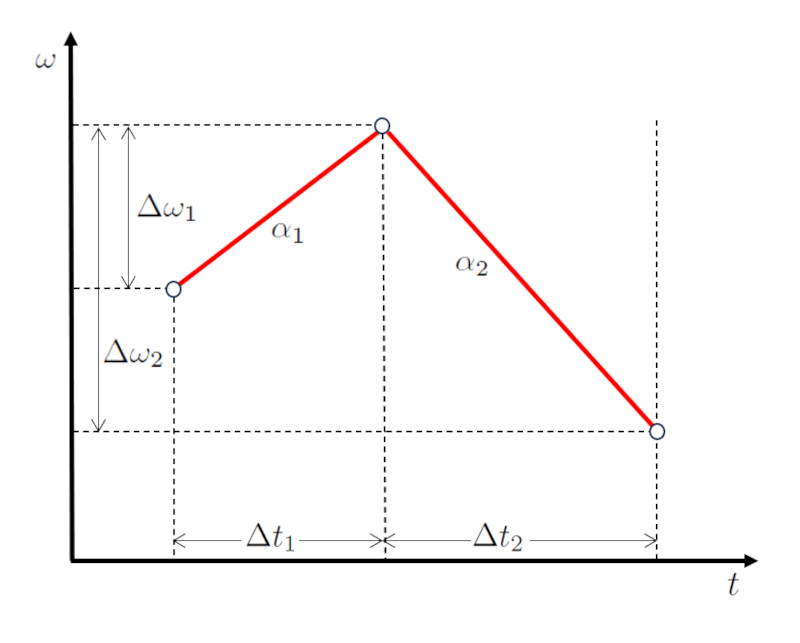
É importante notar que os intervalos de tempo o tempo decorrido na primeira etapa (\Delta t_1) e o tempo gasto na segunda etapa (\Delta t_2) são sequenciais, assim como as diferenças de velocidade la variação das velocidades angulares no primeiro estágio (\Delta\omega_1) e la variação das velocidades angulares no segundo estágio (\Delta\omega_2).
ID:(12521, 0)
Velocidade angular em um movimento de dois estágios
Descrição
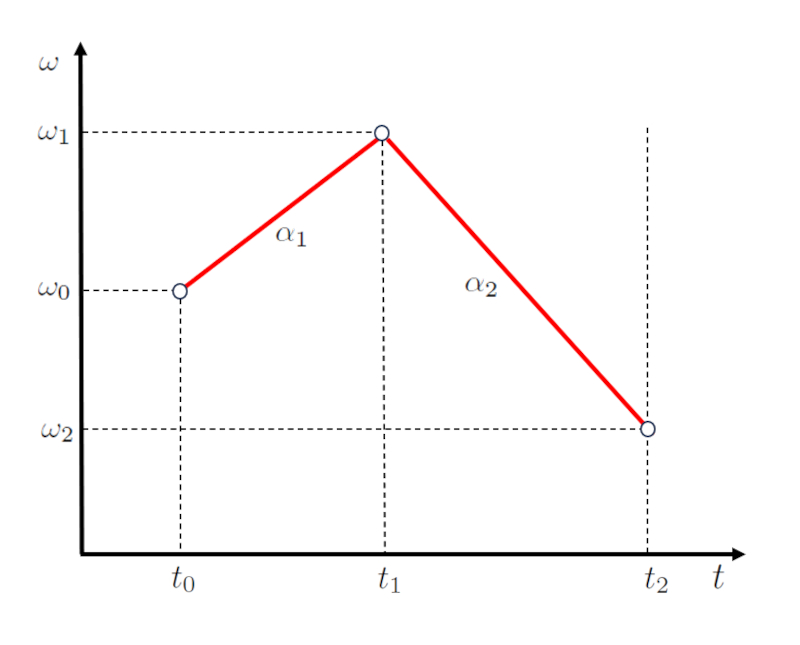
Na análise de um movimento segmentado em duas etapas, a primeira fase é caracterizada por uma função linear que incorpora os pontos o tempo inicial (t_0), o tempo final da primeira e início da segunda etapa (t_1), la velocidade angular inicial (\omega_0) e la primeira velocidade angular final e início do segundo estágio (\omega_1). Esta é expressa através de uma linha com inclinação de la aceleração angular durante o primeiro estágio (\alpha_1), cuja relação matemática é especificada na seguinte equação:
| \omega_1 = \omega_0 + \alpha_1 ( t_1 - t_0 ) |
Na transição para a segunda etapa, que é definida pelos pontos la primeira velocidade angular final e início do segundo estágio (\omega_1), la velocidade angular final do segundo estágio (\omega_2), o tempo final da primeira e início da segunda etapa (t_1) e o hora de término da segunda etapa (t_2), adota-se uma nova função linear com uma inclinação de la aceleração angular durante o segundo estágio (\alpha_2). Esta relação é delineada pela segunda equação apresentada:
| \omega_2 = \omega_1 + \alpha_2 ( t_2 - t_1 ) |
A representação gráfica destas relações lineares é ilustrada abaixo, fornecendo uma visualização clara de como a inclinação varia entre as duas etapas:
ID:(12522, 0)
Ângulo em um movimento de dois estágios
Descrição
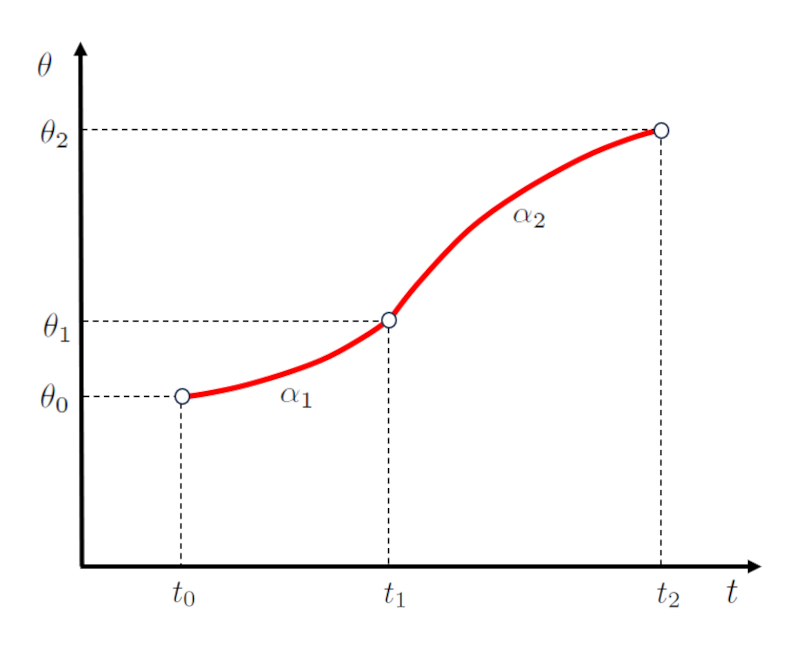
Em um cenário de movimento dividido em duas etapas, o ângulo no final da primeira etapa é o mesmo que o ângulo no início da segunda etapa, designado como o primeiro ângulo final e segunda etapa começaram (\theta_1).
Da mesma forma, o momento em que a primeira etapa termina coincide com o início da segunda etapa, marcado por o tempo final da primeira e início da segunda etapa (t_1).
Dado que o movimento é definido pela aceleração angular experimentada, a velocidade angular no final da primeira etapa deve coincidir com a velocidade angular inicial da segunda etapa, indicada por la primeira velocidade angular final e início do segundo estágio (\omega_1).
No contexto de uma aceleração angular constante, o ângulo em o primeiro ângulo final e segunda etapa começaram (\theta_1) é determinado pelas variáveis o ângulo inicial (\theta_0), la velocidade angular inicial (\omega_0), la aceleração angular durante o primeiro estágio (\alpha_1), o tempo final da primeira e início da segunda etapa (t_1) e o tempo inicial (t_0), conforme mostrado na seguinte equação:
| \theta_1 = \theta_0 + \omega_0 ( t_1 - t_0 )+\displaystyle\frac{1}{2} \alpha_1 ( t_1 - t_0 )^2 |
Na segunda etapa, o ângulo em la ângulo final do segundo estágio (\theta_2) é calculado com base em o primeiro ângulo final e segunda etapa começaram (\theta_1), la primeira velocidade angular final e início do segundo estágio (\omega_1), la aceleração angular durante o segundo estágio (\alpha_2), o tempo final da primeira e início da segunda etapa (t_1) e o hora de término da segunda etapa (t_2), de acordo com:
| \theta_2 = \theta_1 + \omega_1 ( t_2 - t_1 )+\displaystyle\frac{1}{2} \alpha_2 ( t_2 - t_1 )^2 |
A representação gráfica dessas relações é ilustrada abaixo:
ID:(12520, 0)
Aceleração angular constante, dois estágios
Modelo
No caso de um movimento angular acelerado em duas etapas, no momento em que se passa da primeira para a segunda aceleração angular, a velocidade angular final da primeira etapa se torna a velocidade angular inicial da segunda. O mesmo ocorre com o ângulo, onde o ângulo final da primeira etapa é igual ao ângulo inicial da segunda etapa. Ao contrário do modelo de duas velocidades angulares, este modelo não apresenta problemas de descontinuidade, exceto que a aceleração angular pode mudar de forma abrupta, o que é tecnicamente possível, embora muitas vezes não seja muito realista.
Variáveis
Cálculos
Cálculos
Equações
A defini o da acelera o angular m dia baseada no ngulo percorrido
| \Delta\omega = \omega_2 - \omega_1 |
e no tempo decorrido
| \Delta t \equiv t - t_0 |
A rela o entre os dois definida como a acelera o angular m dia
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
dentro desse intervalo de tempo.
(ID 3234)
A defini o da acelera o angular m dia baseada no ngulo percorrido
| \Delta\omega = \omega_2 - \omega_1 |
e no tempo decorrido
| \Delta t \equiv t - t_0 |
A rela o entre os dois definida como a acelera o angular m dia
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
dentro desse intervalo de tempo.
(ID 3234)
Dado que la aceleração média (\bar{a}) igual a la diferença de velocidade (\Delta v) e o tempo decorrido (\Delta t) conforme
| \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t } |
e la aceleração angular média (\bar{\alpha}) igual a la diferença de velocidades angulares (\Delta\omega) e o tempo decorrido (\Delta t) conforme
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
deduz-se que
\bar{a}=\displaystyle\frac{\Delta v}{\Delta t}=r\displaystyle\frac{\Delta\omega}{\Delta t}=\bar{\alpha}
Assumindo que la aceleração angular média (\bar{\alpha}) igual a la aceleração angular constante (\alpha_0)
| \bar{\alpha} = \alpha_0 |
e supondo que la aceleração média (\bar{a}) igual a la aceleração constante (a_0)
| a_0 = \bar{a} |
obt m-se a seguinte equa o:
| a = r \alpha |
(ID 3236)
Dado que la aceleração média (\bar{a}) igual a la diferença de velocidade (\Delta v) e o tempo decorrido (\Delta t) conforme
| \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t } |
e la aceleração angular média (\bar{\alpha}) igual a la diferença de velocidades angulares (\Delta\omega) e o tempo decorrido (\Delta t) conforme
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
deduz-se que
\bar{a}=\displaystyle\frac{\Delta v}{\Delta t}=r\displaystyle\frac{\Delta\omega}{\Delta t}=\bar{\alpha}
Assumindo que la aceleração angular média (\bar{\alpha}) igual a la aceleração angular constante (\alpha_0)
| \bar{\alpha} = \alpha_0 |
e supondo que la aceleração média (\bar{a}) igual a la aceleração constante (a_0)
| a_0 = \bar{a} |
obt m-se a seguinte equa o:
| a = r \alpha |
(ID 3236)
Se assumirmos que la aceleração angular média (\bar{\alpha}) constante, equivalente a la aceleração angular constante (\alpha_0), ent o a seguinte equa o se aplica:
| \bar{\alpha} = \alpha_0 |
Portanto, considerando la diferença de velocidades angulares (\Delta\omega) junto com la velocidade angular (\omega) e la velocidade angular inicial (\omega_0):
| \Delta\omega = \omega_2 - \omega_1 |
e o tempo decorrido (\Delta t) em rela o a o tempo (t) e o tempo inicial (t_0):
| \Delta t \equiv t - t_0 |
a equa o para la aceleração angular média (\bar{\alpha}):
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
pode ser expressa como:
\alpha_0 = \alpha = \displaystyle\frac{\Delta \omega}{\Delta t} = \displaystyle\frac{\omega - \omega_0}{t - t_0}
Resolvendo isso, obtemos:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
(ID 3237)
Se assumirmos que la aceleração angular média (\bar{\alpha}) constante, equivalente a la aceleração angular constante (\alpha_0), ent o a seguinte equa o se aplica:
| \bar{\alpha} = \alpha_0 |
Portanto, considerando la diferença de velocidades angulares (\Delta\omega) junto com la velocidade angular (\omega) e la velocidade angular inicial (\omega_0):
| \Delta\omega = \omega_2 - \omega_1 |
e o tempo decorrido (\Delta t) em rela o a o tempo (t) e o tempo inicial (t_0):
| \Delta t \equiv t - t_0 |
a equa o para la aceleração angular média (\bar{\alpha}):
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
pode ser expressa como:
\alpha_0 = \alpha = \displaystyle\frac{\Delta \omega}{\Delta t} = \displaystyle\frac{\omega - \omega_0}{t - t_0}
Resolvendo isso, obtemos:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
(ID 3237)
No caso de la aceleração angular constante (\alpha_0), la velocidade angular (\omega) como fun o de o tempo (t) segue uma rela o linear com o tempo inicial (t_0) e la velocidade angular inicial (\omega_0) na forma:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Dado que o deslocamento angular igual rea sob a curva de velocidade angular-tempo, neste caso, pode-se adicionar as contribui es do ret ngulo:
\omega_0(t-t_0)
e do tri ngulo:
\displaystyle\frac{1}{2}\alpha_0(t-t_0)^2
Isso nos leva express o para o ângulo (\theta) e o ângulo inicial (\theta_0):
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
(ID 3682)
No caso de la aceleração angular constante (\alpha_0), la velocidade angular (\omega) como fun o de o tempo (t) segue uma rela o linear com o tempo inicial (t_0) e la velocidade angular inicial (\omega_0) na forma:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Dado que o deslocamento angular igual rea sob a curva de velocidade angular-tempo, neste caso, pode-se adicionar as contribui es do ret ngulo:
\omega_0(t-t_0)
e do tri ngulo:
\displaystyle\frac{1}{2}\alpha_0(t-t_0)^2
Isso nos leva express o para o ângulo (\theta) e o ângulo inicial (\theta_0):
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
(ID 3682)
(ID 4353)
(ID 4353)
Se resolvermos o tempo na equa o de la velocidade angular (\omega) que inclui as vari veis la velocidade angular inicial (\omega_0), o tempo (t), o tempo inicial (t_0) e la aceleração angular constante (\alpha_0):
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
obtemos a seguinte express o para o tempo:
t - t_0 = \displaystyle\frac{\omega - \omega_0}{\alpha_0}
Esta solu o pode ser substitu da na equa o para calcular o ângulo (\theta) usando o ângulo inicial (\theta_0) da seguinte forma:
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
o que resulta na seguinte equa o:
| \theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 } |
(ID 4386)
Se resolvermos o tempo na equa o de la velocidade angular (\omega) que inclui as vari veis la velocidade angular inicial (\omega_0), o tempo (t), o tempo inicial (t_0) e la aceleração angular constante (\alpha_0):
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
obtemos a seguinte express o para o tempo:
t - t_0 = \displaystyle\frac{\omega - \omega_0}{\alpha_0}
Esta solu o pode ser substitu da na equa o para calcular o ângulo (\theta) usando o ângulo inicial (\theta_0) da seguinte forma:
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
o que resulta na seguinte equa o:
| \theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 } |
(ID 4386)
Exemplos
(ID 15413)
Em um cen rio de movimento em duas etapas, inicialmente o objeto ajusta sua velocidade pela diferen a de la variação das velocidades angulares no primeiro estágio (\Delta\omega_1) durante um per odo de o tempo decorrido na primeira etapa (\Delta t_1), experimentando uma acelera o de la aceleração angular durante o primeiro estágio (\alpha_1).
| \alpha_1 \equiv \displaystyle\frac{ \Delta\omega_1 }{ \Delta t_1 } |
Na segunda etapa, o objeto continua modificando sua velocidade por la variação das velocidades angulares no segundo estágio (\Delta\omega_2) ao longo de um intervalo de tempo o tempo gasto na segunda etapa (\Delta t_2), com uma acelera o de la aceleração angular durante o segundo estágio (\alpha_2).
| \alpha_2 \equiv \displaystyle\frac{ \Delta\omega_2 }{ \Delta t_2 } |
Ao visualizar isso graficamente, obt m-se um diagrama de velocidade versus tempo como mostrado abaixo:
importante notar que os intervalos de tempo o tempo decorrido na primeira etapa (\Delta t_1) e o tempo gasto na segunda etapa (\Delta t_2) s o sequenciais, assim como as diferen as de velocidade la variação das velocidades angulares no primeiro estágio (\Delta\omega_1) e la variação das velocidades angulares no segundo estágio (\Delta\omega_2).
(ID 12521)
Na an lise de um movimento segmentado em duas etapas, a primeira fase caracterizada por uma fun o linear que incorpora os pontos o tempo inicial (t_0), o tempo final da primeira e início da segunda etapa (t_1), la velocidade angular inicial (\omega_0) e la primeira velocidade angular final e início do segundo estágio (\omega_1). Esta expressa atrav s de uma linha com inclina o de la aceleração angular durante o primeiro estágio (\alpha_1), cuja rela o matem tica especificada na seguinte equa o:
| \omega_1 = \omega_0 + \alpha_1 ( t_1 - t_0 ) |
Na transi o para a segunda etapa, que definida pelos pontos la primeira velocidade angular final e início do segundo estágio (\omega_1), la velocidade angular final do segundo estágio (\omega_2), o tempo final da primeira e início da segunda etapa (t_1) e o hora de término da segunda etapa (t_2), adota-se uma nova fun o linear com uma inclina o de la aceleração angular durante o segundo estágio (\alpha_2). Esta rela o delineada pela segunda equa o apresentada:
| \omega_2 = \omega_1 + \alpha_2 ( t_2 - t_1 ) |
A representa o gr fica destas rela es lineares ilustrada abaixo, fornecendo uma visualiza o clara de como a inclina o varia entre as duas etapas:
(ID 12522)
Em um cen rio de movimento dividido em duas etapas, o ngulo no final da primeira etapa o mesmo que o ngulo no in cio da segunda etapa, designado como o primeiro ângulo final e segunda etapa começaram (\theta_1).
Da mesma forma, o momento em que a primeira etapa termina coincide com o in cio da segunda etapa, marcado por o tempo final da primeira e início da segunda etapa (t_1).
Dado que o movimento definido pela acelera o angular experimentada, a velocidade angular no final da primeira etapa deve coincidir com a velocidade angular inicial da segunda etapa, indicada por la primeira velocidade angular final e início do segundo estágio (\omega_1).
No contexto de uma acelera o angular constante, o ngulo em o primeiro ângulo final e segunda etapa começaram (\theta_1) determinado pelas vari veis o ângulo inicial (\theta_0), la velocidade angular inicial (\omega_0), la aceleração angular durante o primeiro estágio (\alpha_1), o tempo final da primeira e início da segunda etapa (t_1) e o tempo inicial (t_0), conforme mostrado na seguinte equa o:
| \theta_1 = \theta_0 + \omega_0 ( t_1 - t_0 )+\displaystyle\frac{1}{2} \alpha_1 ( t_1 - t_0 )^2 |
Na segunda etapa, o ngulo em la ângulo final do segundo estágio (\theta_2) calculado com base em o primeiro ângulo final e segunda etapa começaram (\theta_1), la primeira velocidade angular final e início do segundo estágio (\omega_1), la aceleração angular durante o segundo estágio (\alpha_2), o tempo final da primeira e início da segunda etapa (t_1) e o hora de término da segunda etapa (t_2), de acordo com:
| \theta_2 = \theta_1 + \omega_1 ( t_2 - t_1 )+\displaystyle\frac{1}{2} \alpha_2 ( t_2 - t_1 )^2 |
A representa o gr fica dessas rela es ilustrada abaixo:
(ID 12520)
(ID 15424)
ID:(1409, 0)