
Momentane Winkelbeschleunigung
Storyboard 
Um zu beschreiben, wie sich die Winkelgeschwindigkeit im Laufe der Zeit entwickelt, muss man ihre Variation im Verhältnis zur Zeit betrachten.Die Beziehung zur Veränderung der Winkelgeschwindigkeit entspricht der Winkelverschiebung über die verstrichene Zeit, die, wenn sie durch diese Zeit geteilt wird, die Winkelbeschleunigung ergibt.Für ein infinitesimal kleines Zeitintervall entspricht die Winkelbeschleunigung der momentanen Winkelbeschleunigung.
ID:(1452, 0)
Aceleración angular como derivada
Konzept
Wenn eine Zeitspanne $t$ mit einer Winkelgeschwindigkeit $\omega(t)$ verstrichen ist und ein Punkt zu einem zukünftigen Zeitpunkt $t+\Delta t$ mit einer Winkelgeschwindigkeit $\omega(t+\Delta t)$ beobachtet wird, kann die Winkelbeschleunigung als die Variation
$\omega(t+\Delta t)-\omega(t)$
über die Zeit $\Delta t$ abgeschätzt werden:
$\alpha\sim\displaystyle\frac{\omega(t+\Delta t)-\omega(t)}{\Delta t}$
Wenn der Wert von $\Delta t$ kleiner wird, nimmt die Beschleunigung die Rolle der Tangente an der Geschwindigkeitskurve zu diesem Zeitpunkt ein:
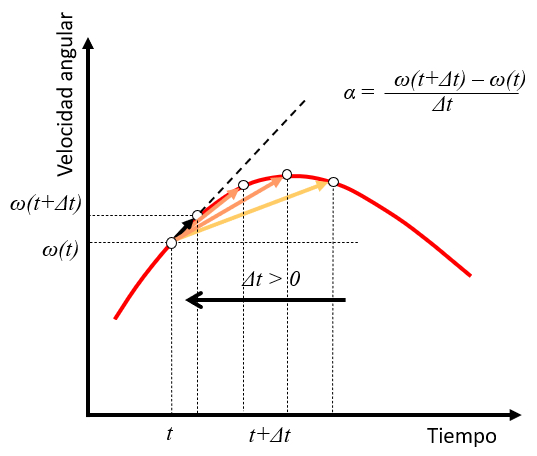
Dies verallgemeinert, was bereits für den Fall konstanter Winkelbeschleunigung gesehen wurde.
ID:(11413, 0)
Tangentialbeschleunigung, Rechte-Hand-Regel
Bild
Die Ausrichtung der Tangentialbeschleunigung kann mithilfe der Rechten-Hand-Regel ermittelt werden, indem die Finger in Richtung der Achse zeigen und dann in Richtung des Radius gedreht werden:
ID:(11600, 0)
Momentane Winkelbeschleunigung
Modell
Um zu beschreiben, wie sich die Winkelgeschwindigkeit im Laufe der Zeit entwickelt, muss man ihre Variation im Verhältnis zur Zeit betrachten. Die Beziehung zur Veränderung der Winkelgeschwindigkeit entspricht der Winkelverschiebung über die verstrichene Zeit, die, wenn sie durch diese Zeit geteilt wird, die Winkelbeschleunigung ergibt. Für ein infinitesimal kleines Zeitintervall entspricht die Winkelbeschleunigung der momentanen Winkelbeschleunigung.
Variablen
Berechnungen
Berechnungen
Gleichungen
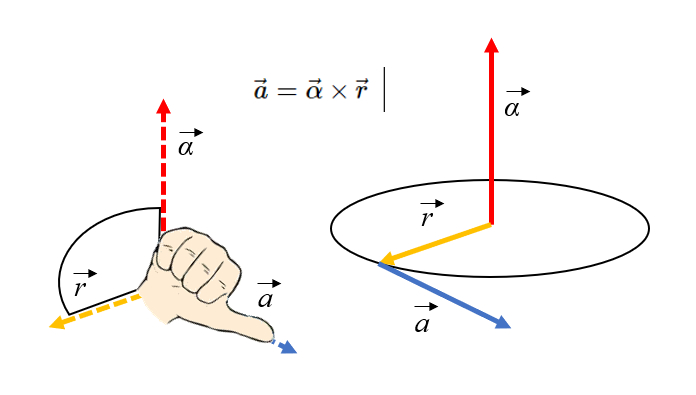
Angesichts der Tatsache, dass die Tangentialbeschleunigung
| $ a = r \alpha $ |
ist, und wenn der Einheitsvektor der Achse $\hat{n}$ und der radiale Einheitsvektor $\hat{r}$ ist, kann der Tangentialvektor durch das Kreuzprodukt berechnet werden:
$\hat{t} = \hat{n} \times \hat{r}$
Folglich, unter Ber cksichtigung dessen, dass
$\vec{a} = a \hat{t}$
,
$\vec{r} = r \hat{r}$
und
$\vec{\alpha} = \alpha \hat{n}$
,
k nnen wir ableiten, dass
$\vec{a} = a \hat{t} = a \hat{n} \times \hat{r} = r \alpha \hat{n} \times \hat{r} = \vec{\alpha} \times \vec{r}$
,
was sich bersetzen l sst in
| $ \vec{a} = \vec{\alpha} \times \vec{r} $ |
.
(ID 11598)
Beispiele
(ID 15415)
Wenn eine Zeitspanne $t$ mit einer Winkelgeschwindigkeit $\omega(t)$ verstrichen ist und ein Punkt zu einem zuk nftigen Zeitpunkt $t+\Delta t$ mit einer Winkelgeschwindigkeit $\omega(t+\Delta t)$ beobachtet wird, kann die Winkelbeschleunigung als die Variation
$\omega(t+\Delta t)-\omega(t)$
ber die Zeit $\Delta t$ abgesch tzt werden:
$\alpha\sim\displaystyle\frac{\omega(t+\Delta t)-\omega(t)}{\Delta t}$
Wenn der Wert von $\Delta t$ kleiner wird, nimmt die Beschleunigung die Rolle der Tangente an der Geschwindigkeitskurve zu diesem Zeitpunkt ein:
Dies verallgemeinert, was bereits f r den Fall konstanter Winkelbeschleunigung gesehen wurde.
(ID 11413)
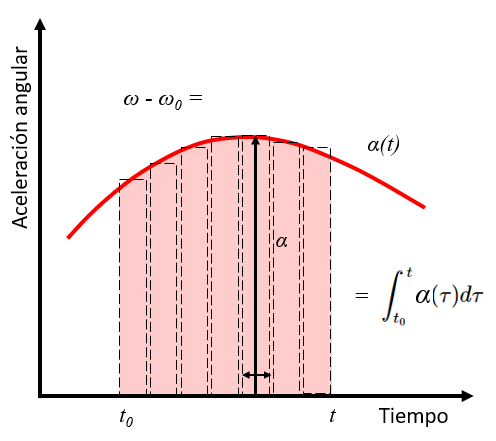
Das Integral einer Funktion entspricht der Fl che unter der Kurve, die die Funktion definiert. Daher entspricht das Integral der Winkelbeschleunigung zwischen den Zeiten $t_0$ und $t$ der nderung der Winkelgeschwindigkeit zwischen der anf nglichen Winkelgeschwindigkeit $\omega_0$ und $\omega$.
Unter Verwendung von anfängliche Winkelgeschwindigkeit $rad/s$, augenblickliche Winkelbeschleunigung $rad/s^2$, startzeit $s$, winkelgeschwindigkeit $rad/s$ und zeit $s$ erhalten wir:
| $ \omega = \omega_0 +\displaystyle\int_{t_0}^t \alpha\,d\tau $ |
Dies wird im folgenden Diagramm dargestellt:
(ID 11415)
Die Ausrichtung der Tangentialbeschleunigung kann mithilfe der Rechten-Hand-Regel ermittelt werden, indem die Finger in Richtung der Achse zeigen und dann in Richtung des Radius gedreht werden:
(ID 11600)
(ID 15426)
ID:(1452, 0)