
Konstante Winkelgeschwindigkeit
Storyboard 
Um zu beschreiben, wie sich der Winkel im Laufe der Zeit entwickelt, ist es notwendig, seine Variation im Laufe der Zeit zu analysieren.Die Beziehung zwischen der Veränderung des Winkels entspricht dem Winkel des zurückgelegten Bogens in der vergangenen Zeit, der, wenn er durch diese Zeit geteilt wird, zur Winkelgeschwindigkeit wird.Wenn ein endliches Zeitintervall betrachtet wird, stellt die Winkelgeschwindigkeit die durchschnittliche Winkelgeschwindigkeit während dieses Intervalls dar.
ID:(611, 0)
Zurückgelegter Winkel
Beschreibung
Sobald das Konzept der vergangenen Zeit eingeführt wurde, kann die Bewegung in Bezug auf den zurückgelegten Winkel definiert werden. Dazu müssen wir Folgendes messen:• den aktuellen Winkel, der als Winkeldifferenz zu einem Ursprungspunkt bestimmt wird, von dem aus wir messen;• den Anfangswinkel, der als Winkeldifferenz zum gleichen vorherigen Ursprungspunkt bestimmt wird und als Differenz zwischen dem ersten und dem zweiten berechnet wird.
ID:(12516, 0)
Verstrichene Zeit
Konzept
Die Grundlage für die Beschreibung jeder Entwicklung ist die Definition der Zeit, in der sie beschrieben wird. Insbesondere wird mit der Abgelaufene Zeit ($\Delta t$) seit einem Referenzzeitpunkt gearbeitet.
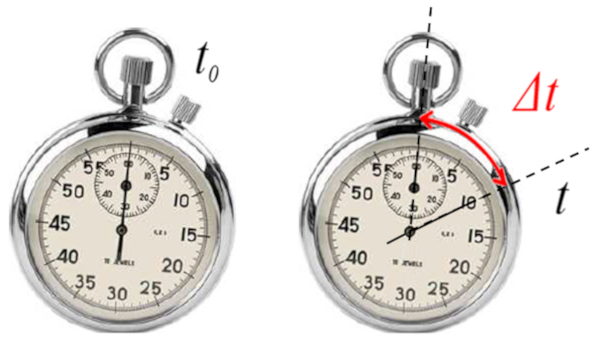
• Im Falle eines Stoppuhrs wird die verstrichene Zeit seit Beginn der Messung gemessen, d.h. eine Null-Startzeit ($t_0=0$).
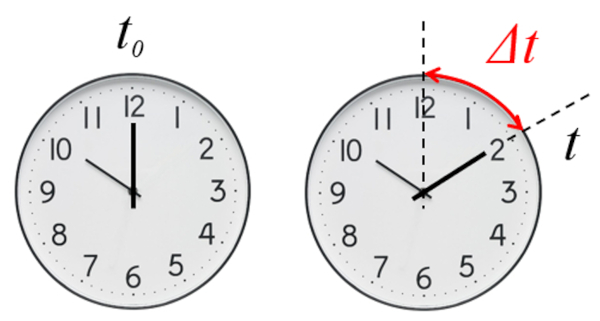
• Im Falle einer Uhr wird die verstrichene Zeit seit einem definierten Startzeitpunkt gemessen, der null oder ungleich null sein kann.
ID:(12507, 0)
Konstante Winkelgeschwindigkeit
Konzept
Eine Situation, die auftreten kann, ist wenn die Winkelgeschwindigkeit konstant ist, was bedeutet, dass der zurückgelegte Winkel proportional zur verstrichenen Zeit zunimmt. Mit lässt sich dies folgendermaßen ausdrücken:
$\omega=\omega_0$
Es ist wichtig zu beachten, dass die Winkelgeschwindigkeit immer relativ zu einem Bezugssystem gemessen wird. In diesem Fall bezieht sich die konstante Winkelgeschwindigkeit auf das Bezugssystem, das für die Messung verwendet wird.
ID:(11410, 0)
Winkelgeschwindigkeit in grafischer Form
Beschreibung
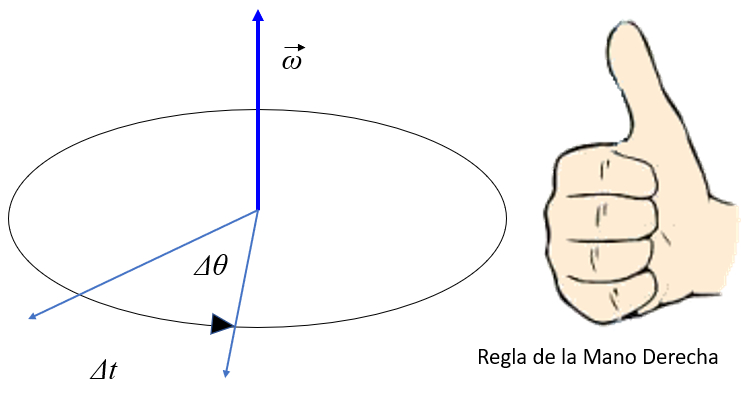
Die mittlere Winkelgeschwindigkeit wird als der im vergangenen Zeitraum zurückgelegte Winkel definiert. Da eine Drehung eine Achse erfordert, wird diese orthogonal zur Scheibe gezeichnet, die den rotierenden Körper darstellt. Um die Achse zu integrieren, wird die Winkelgeschwindigkeit als ein Vektor definiert, dessen Betrag der Winkel pro Zeiteinheit ist und dessen Richtung in Abhängigkeit von der Ausrichtung der Achse definiert ist:
ID:(10967, 0)
Winkel Zeit für konstante Winkelgeschwindigkeit und Anfangszeit
Bild
Um die gegebene Aussage auf Deutsch zu verbessern, schlage ich Folgendes vor:
Im Fall von konstanter Winkelgeschwindigkeit und bekannter Anfangszeit kann der Winkel mithilfe der folgenden Formel berechnet werden:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )$ |
Die Formel wird graphisch wie folgt dargestellt:
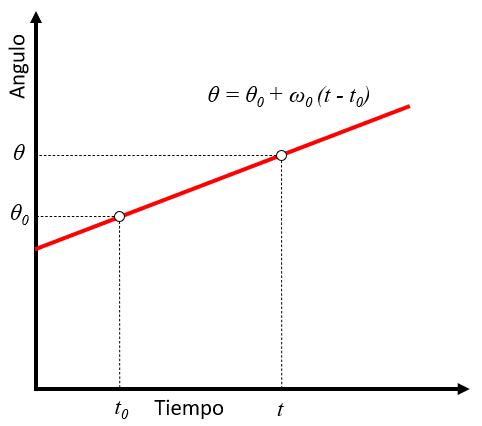
Diese Formel ist nützlich, um den Winkel zu berechnen, den ein Objekt in Situationen gedreht hat, in denen sowohl die Winkelgeschwindigkeit als auch die Anfangszeit bekannt sind. Die Konstanz der Winkelgeschwindigkeit zeigt an, dass die Größe der Winkelgeschwindigkeit sich nicht mit der Zeit ändert. Die Anfangszeit ist die Referenzzeit, von der aus die verstrichene Zeit gemessen wird. Folglich kann der von dem Objekt gedrehte Winkel direkt berechnet werden, indem die Winkelgeschwindigkeit mit der verstrichenen Zeit seit der Anfangszeit multipliziert wird.
ID:(11412, 0)
Tangentialgeschwindigkeit
Beschreibung
Wenn ein Objekt einem Modus unterworfen wird, um einen konstanten Radius beizubehalten, wird es sich wie in der Abbildung dargestellt drehen. Bei Betrachtung der Abbildung würde man bemerken, dass die Masse eine translatorische Bewegung mit einer tangentialen Geschwindigkeit ausführt, die dem Radius mal der Winkelgeschwindigkeit entspricht:
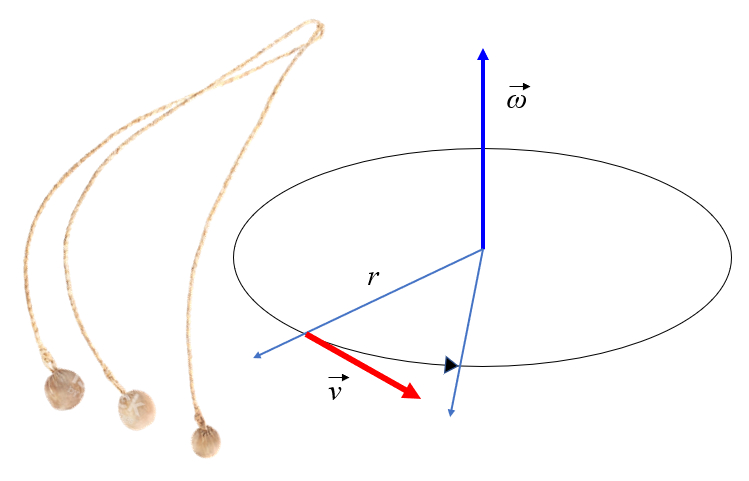
Wenn jedoch das Element, das das Objekt mit der Achse verbindet, abgeschnitten wird, wird sich das Objekt weiterhin tangential in einer geraden Linie bewegen.
ID:(310, 0)
Tangentialgeschwindigkeit, rechte Hand Regel
Bild
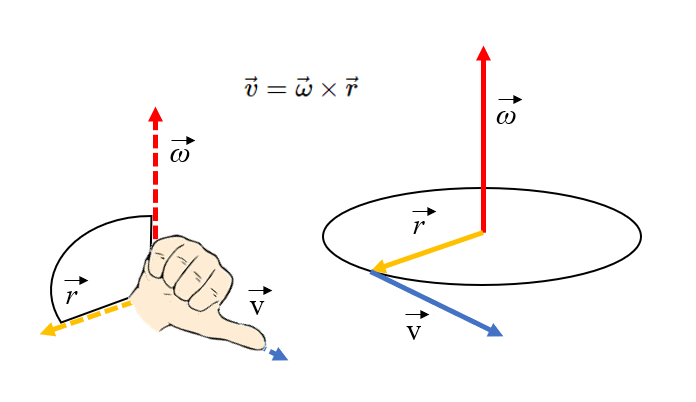
Die Orientierung der Tangentialgeschwindigkeit kann mit der Rechten-Hand-Regel bestimmt werden. Wenn die Finger in Richtung der Rotationsachse zeigen und dann in Richtung des Positionsvektors (Radius) gebogen werden, zeigt der Daumen in Richtung der Tangentialgeschwindigkeit:
ID:(11599, 0)
Konstante Winkelgeschwindigkeit
Modell
Um zu beschreiben, wie sich der Winkel im Laufe der Zeit entwickelt, ist es notwendig, seine Variation im Laufe der Zeit zu analysieren. Die Beziehung zwischen der Veränderung des Winkels entspricht dem Winkel des zurückgelegten Bogens in der vergangenen Zeit, der, wenn er durch diese Zeit geteilt wird, zur Winkelgeschwindigkeit wird. Wenn ein endliches Zeitintervall betrachtet wird, stellt die Winkelgeschwindigkeit die durchschnittliche Winkelgeschwindigkeit während dieses Intervalls dar.
Variablen
Berechnungen
Berechnungen
Gleichungen
Im Fall, dass die Anfängliche Winkelgeschwindigkeit ($\omega_0$) gleich die Mittlere Winkelgeschwindigkeit ($\bar{\omega}$) ist,
| $ \bar{\omega} = \omega_0 $ |
Deshalb erhalten wir mit die Differenz von Winkel ($\Delta\theta$), welches gleich der Winkel ($\theta$) geteilt durch der Anfangswinkel ($\theta_0$) ist:
| $ \Delta\theta = \theta_2 - \theta_1 $ |
Und mit der Abgelaufene Zeit ($\Delta t$), welches gleich der Zeit ($t$) geteilt durch der Startzeit ($t_0$) ist:
| $ \Delta t \equiv t - t_0 $ |
Wir k nnen die Gleichung f r die Mittlere Winkelgeschwindigkeit ($\bar{\omega}$) umschreiben als:
| $ \omega_0 \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
Dies kann ausgedr ckt werden als:
$\omega_0 = \omega = \displaystyle\frac{\Delta\theta}{\Delta t} = \displaystyle\frac{\theta - \theta_0}{t - t_0}$
Bei der L sung erhalten wir:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )$ |
(ID 1023)
Da die Mittlere Geschwindigkeit ($\bar{v}$) mit die Zurückgelegte Strecke in einer Zeit ($\Delta s$) und der Abgelaufene Zeit ($\Delta t$) gleich ist, was ist
| $ v_0 \equiv\displaystyle\frac{ \Delta s }{ \Delta t }$ |
und mit die Zurückgelegte Strecke in einer Zeit ($\Delta s$) als Bogen eines Kreises und der Radius ($r$) und die Winkelvariation ($\Delta\theta$) ist
| $ \Delta s=r \Delta\theta $ |
und die Definition von die Mittlere Winkelgeschwindigkeit ($\bar{\omega}$) ist
| $ \omega_0 \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
dann ist
$v=\displaystyle\frac{\Delta s}{\Delta t}=r\displaystyle\frac{\Delta\theta}{\Delta t}=r\omega$
Da die Beziehung allgemein ist, kann sie f r momentane Werte angewendet werden, was zu
| $ v = r \omega $ |
f hrt.
(ID 3233)
(ID 3324)
(ID 3324)
Die Definition von die Mittlere Winkelgeschwindigkeit ($\bar{\omega}$) wird als die Winkelvariation ($\Delta\theta$) betrachtet,
| $ \Delta\theta = \theta_2 - \theta_1 $ |
und der Abgelaufene Zeit ($\Delta t$),
| $ \Delta t \equiv t - t_0 $ |
Die Beziehung zwischen beiden wird als die Mittlere Winkelgeschwindigkeit ($\bar{\omega}$) definiert:
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
(ID 3679)
Wenn man von die Ausgangsstellung ($s_0$) ausgeht und die Zurückgelegte Strecke in einer Zeit ($\Delta s$) berechnen möchte, muss ein Wert für die Position ($s$) festgelegt werden.
In einem eindimensionalen System erhält man die Zurückgelegte Strecke in einer Zeit ($\Delta s$), indem man die Ausgangsstellung ($s_0$) von die Position ($s$) subtrahiert. Das ergibt:
| $ \Delta s = s - s_0 $ |
(ID 4352)
Wenn ein Objekt einen Abstand von der Radius ($r$) von einer Achse entfernt ist und eine Drehung von eine Winkelvariation ($\Delta\theta$) durchf hrt, was mit der Winkel ($\theta$) und der Anfangswinkel ($\theta_0$) ergibt
| $ \Delta\theta = \theta_2 - \theta_1 $ |
wird es eine Strecke von die Zurückgelegte Strecke in einer Zeit ($\Delta s$) zur ckgelegt haben, was mit die Position ($s$) und die Ausgangsstellung ($s_0$) ergibt
| $ \Delta s = s - s_0 $ |
Diese Strecke kann berechnet werden, indem man der Radius ($r$) mit dem Winkel multipliziert, also
| $ \Delta s=r \Delta\theta $ |
.
(ID 5302)
Beispiele
(ID 15409)
Sobald das Konzept der vergangenen Zeit eingef hrt wurde, kann die Bewegung in Bezug auf den zur ckgelegten Winkel definiert werden. Dazu m ssen wir Folgendes messen:• den aktuellen Winkel, der als Winkeldifferenz zu einem Ursprungspunkt bestimmt wird, von dem aus wir messen;• den Anfangswinkel, der als Winkeldifferenz zum gleichen vorherigen Ursprungspunkt bestimmt wird und als Differenz zwischen dem ersten und dem zweiten berechnet wird.
(ID 12516)
Die Grundlage f r die Beschreibung jeder Entwicklung ist die Definition der Zeit, in der sie beschrieben wird. Insbesondere wird mit der Abgelaufene Zeit ($\Delta t$) seit einem Referenzzeitpunkt gearbeitet.
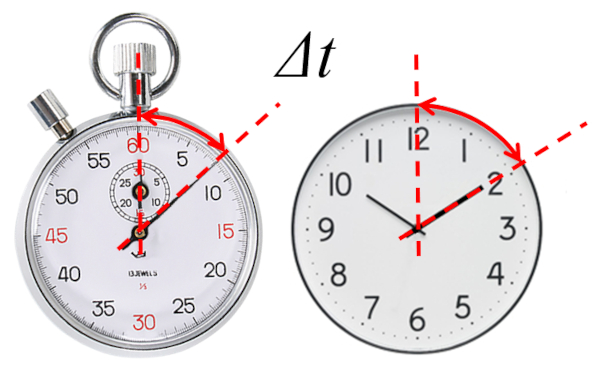
Die Stoppuhr zeigt uns direkt die verstrichene Zeit an, seit ihre Anfangszeit Null ist
Im Falle eines Stoppuhrs wird die verstrichene Zeit seit Beginn der Messung gemessen, d.h. eine Null-Startzeit ($t_0=0$).

Im Fall der Uhr ist es notwendig, den Anfangstyp zu definieren, um die verstrichene Zeit zu bestimmen.
Im Falle einer Uhr wird die verstrichene Zeit seit einem definierten Startzeitpunkt gemessen, der null oder ungleich null sein kann.
Da der Abgelaufene Zeit ($\Delta t$) als die Differenz zwischen der Zeit ($t$) und der Startzeit ($t_0$) berechnet wird:
| $ \Delta t \equiv t - t_0 $ |
ist es m glich, den Zeitursprung zu "verschieben", indem ein konstanter Wert
zu beiden Gr en hinzugef gt wird:
$t \rightarrow t + \tau$
$t_0 \rightarrow t_0 + \tau$
ohne das Ergebnis der verstrichenen Zeit zu beeinflussen:
$\Delta t = t - t_0 \rightarrow (t + \tau) - (t_0 + \tau) = t - t_0 = \Delta t$
Dieses Konzept wird als zeitliche Invarianz bezeichnet, was bedeutet, dass der Wert der verstrichenen Zeit unabh ngig vom spezifischen Startpunkt der Messung unver ndert bleibt.Dies bedeutet, dass die mit diesem Prinzip formulierten Gesetze zeitlich invariant sind, d. h., sie gelten unabh ngig davon, ob sie in der Gegenwart, der Vergangenheit oder der Zukunft angewendet werden.
(ID 12507)
Eine Situation, die auftreten kann, ist wenn die Winkelgeschwindigkeit konstant ist, was bedeutet, dass der zur ckgelegte Winkel proportional zur verstrichenen Zeit zunimmt. Mit l sst sich dies folgenderma en ausdr cken:
$\omega=\omega_0$
Es ist wichtig zu beachten, dass die Winkelgeschwindigkeit immer relativ zu einem Bezugssystem gemessen wird. In diesem Fall bezieht sich die konstante Winkelgeschwindigkeit auf das Bezugssystem, das f r die Messung verwendet wird.
(ID 11410)
Die mittlere Winkelgeschwindigkeit wird als der im vergangenen Zeitraum zur ckgelegte Winkel definiert. Da eine Drehung eine Achse erfordert, wird diese orthogonal zur Scheibe gezeichnet, die den rotierenden K rper darstellt. Um die Achse zu integrieren, wird die Winkelgeschwindigkeit als ein Vektor definiert, dessen Betrag der Winkel pro Zeiteinheit ist und dessen Richtung in Abh ngigkeit von der Ausrichtung der Achse definiert ist:
(ID 10967)
Um die gegebene Aussage auf Deutsch zu verbessern, schlage ich Folgendes vor:
Im Fall von konstanter Winkelgeschwindigkeit und bekannter Anfangszeit kann der Winkel mithilfe der folgenden Formel berechnet werden:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )$ |
Die Formel wird graphisch wie folgt dargestellt:
Diese Formel ist n tzlich, um den Winkel zu berechnen, den ein Objekt in Situationen gedreht hat, in denen sowohl die Winkelgeschwindigkeit als auch die Anfangszeit bekannt sind. Die Konstanz der Winkelgeschwindigkeit zeigt an, dass die Gr e der Winkelgeschwindigkeit sich nicht mit der Zeit ndert. Die Anfangszeit ist die Referenzzeit, von der aus die verstrichene Zeit gemessen wird. Folglich kann der von dem Objekt gedrehte Winkel direkt berechnet werden, indem die Winkelgeschwindigkeit mit der verstrichenen Zeit seit der Anfangszeit multipliziert wird.
(ID 11412)
Wenn ein Objekt einem Modus unterworfen wird, um einen konstanten Radius beizubehalten, wird es sich wie in der Abbildung dargestellt drehen. Bei Betrachtung der Abbildung w rde man bemerken, dass die Masse eine translatorische Bewegung mit einer tangentialen Geschwindigkeit ausf hrt, die dem Radius mal der Winkelgeschwindigkeit entspricht:
Wenn jedoch das Element, das das Objekt mit der Achse verbindet, abgeschnitten wird, wird sich das Objekt weiterhin tangential in einer geraden Linie bewegen.
(ID 310)
Die Orientierung der Tangentialgeschwindigkeit kann mit der Rechten-Hand-Regel bestimmt werden. Wenn die Finger in Richtung der Rotationsachse zeigen und dann in Richtung des Positionsvektors (Radius) gebogen werden, zeigt der Daumen in Richtung der Tangentialgeschwindigkeit:
(ID 11599)
(ID 15420)
ID:(611, 0)